扫码关注
扫码关注























找到 “互补滤波” 相关内容 3 条
- 全部
- 默认排序
综合
课程
直播
文章
问答
文库
用户
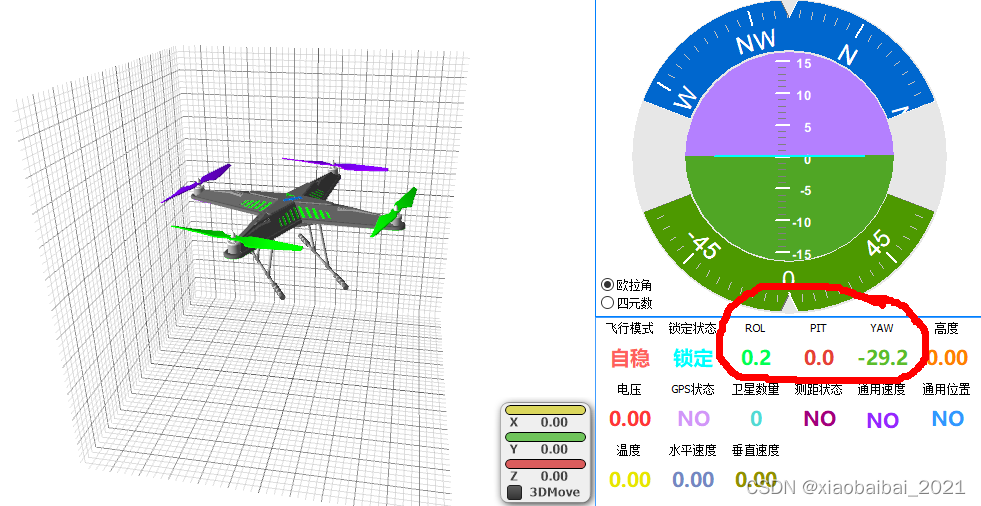
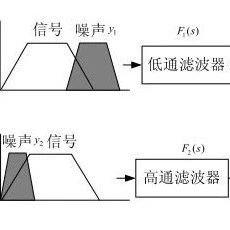
大家好,我是学电子的小白白。本篇文章我们来讲讲如何将陀螺仪和加速度计的数据结合起来,获取更准确的姿态数据,使用的是互补滤波的方法。阅读本文需有一定的知识基础,可以参见作者以前MPU6050的两篇文章:《MPU6050陀螺仪和加速度计数据的获取和校准》、《MPU6050官方DMP的移植和使用》,以及了
1682 0 0
大家好,我是学电子的小白白~上一篇我们讲了陀螺仪与加速度计的数据融合,本篇文章是互补滤波的续篇,接着讲陀螺仪与磁力计的数据融合。1)为什么需要磁力计的数据先回忆一下上一篇内容,加速度计是如何修正陀螺仪的呢?我们是假定了在大部分时间里,载体是静止或者匀速直线运动的,所以可以认为加速度计的测量值,就是重
824 0 0
大家好,我是学电子的小白白~上一篇我们讲了陀螺仪与加速度计的数据融合,本篇文章是互补滤波的续篇,接着讲陀螺仪与磁力计的数据融合。1)为什么需要磁力计的数据先回忆一下上一篇内容,加速度计是如何修正陀螺仪的呢?我们是假定了在大部分时间里,载体是静止或者匀速直线运动的,所以可以认为加速度计的测量值,就是重
211 0 0