扫码关注
扫码关注
























- 全部
- 默认排序
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,用于工业自动化领域

宏打印函数在我们的嵌入式开发中,使用printf打印一些信息是一种常用的调试手段。但是,在打印的信息量比较多的时候,就比较难知道哪些信息在哪个函数里进行打印。特别是对于异常情况的打印,我们需要快速定位到异常情况的位置。这时候我们可以使用宏定义来封装一个宏打印函数,这个宏打印函数可以显示打印信息所在的
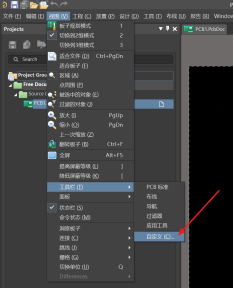
Altium Designer恢复默认快捷建使用AD设置了快捷键没作用或不小心设置的快捷键冲突了,觉得不好用想恢复默认快捷键,这时候该怎么操作呢?下面就来看下具体操作步骤。1、软件有恢复快捷键的设置,在视图-工具栏-自定义,还可以在下图红框
主角:sys/queue.hqueue.h是Linux、FreeBSD中的一个头文件。FreeBSD:FreeBSD 是一种类 UNIX操作系统。这是一个很实用的头文件,因为这个头文件里全是宏定义操作,所以其不仅可以使用在Linux/嵌入式Linux项目中,也可以使用在单片机项目中,我也是因为在我们
很多人都不了解欠电压继电器,甚至没听说过和这个电子元件,但他在低压开关设备和控制设备十分重要,所以今天本文将详谈欠电压继电器的定义及分类,希望对小伙伴们有所帮助。1、欠电压继电器的定义在GB14048.1-2006 《低压开关设备和控制设备

人工智能有两个明显的目标,就目前而言,这两个目标并不相互排斥,但其中只有一个可以长期造福人类。这些目标要么是加强人们的工作,要么是取代人。最近有两个故事引起了我的注意,这表明我们可能需要调整我们认为的道德行为以正确利用人工智能。第一个故事是
元件封装所需的焊盘形状种类繁多,而标准焊盘并不总是足够的。要创建与上述不同的形状,您必须创建自定义形状焊盘也就是异形焊盘。创建异形焊盘的方法有四种:第一种、放置“实心区域”创建异形焊盘;第二种、是通过闭合轮廓转换生成异形焊盘;第三种、利用标
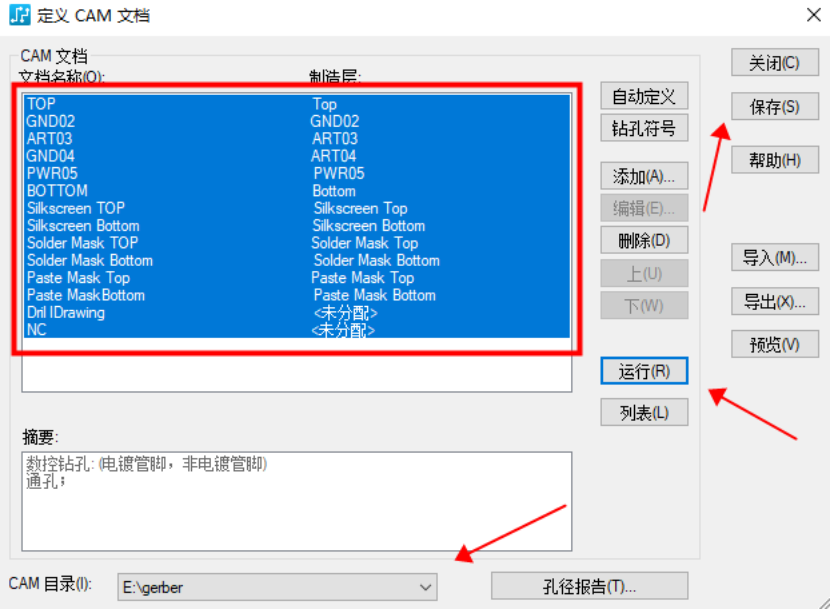
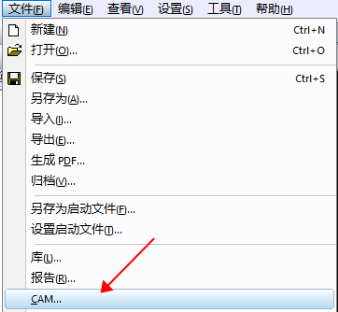
执行“文件-CAM”功能,在弹出的“定义CAM文档”页面点击“添加”按钮,在弹出的“添加文档”页面下“文档名称”栏输入名称,一般与电气层名相同,如“TOP”,在“文档类型”栏选择“布线/分割平面”类型,在“输出文件”栏修改名称,在“制造层”
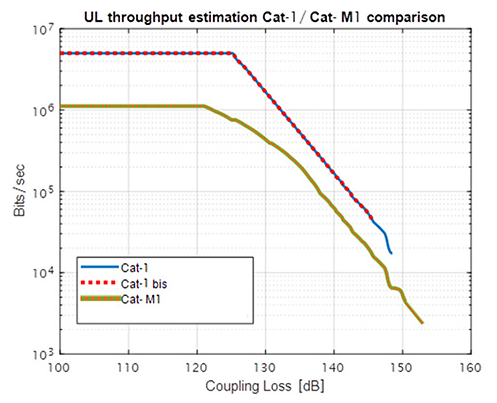
CAT-1 LTE调制解调器最初于2008年定义为一种低成本、低功耗的替代方案,用于连接需要传输有限数据量的物联网设备。然而,当时的供应商和网络提供商关注的是更高的吞吐量。实际的设备推出大约是在五六年后开始的。2016年,在最初的CAT-1
所有CAM层文件设置完成后,点击“定义CAM文档”页面的“保存”按钮,如图5-183所示为6层设计的文件情况。在“CAM目录”栏选择Gerber文件生成的文件夹,在“CAM文档”栏单击并配合“Shift”键将所有CAM层选中,并点击“运行”