扫码关注
扫码关注























- 全部
- 默认排序

RaPIDAI的Mary Hardcastle着眼于保健技术的进步,解释了医院在急诊室实施人工智能需要做些什么。尽管在过去十年中卫生技术取得了令人难以置信的进步,但许多医院仍然不愿对其急诊科的运作方式做出有意义的改变——直到 COVID-1

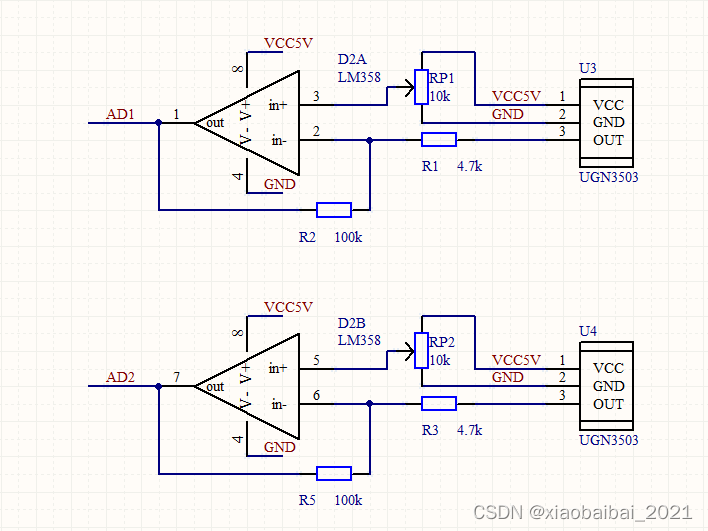
今天教大家来做一个磁悬浮玩具,先上两张成品的效果图:1)磁悬浮的基本原理磁悬浮有下推式和上拉式两种基本形式。所谓下推式,就是控制部分在底座上,悬浮的磁铁在上面,依靠底座从下往上的排斥磁力推动磁铁悬浮;而上拉式,是控制部分在上面,悬浮的磁铁在下面,依靠控制部分从上方的吸引力吸住磁铁不会落下去。本文实现
在 /proc 目录下,可以看到许多以数字命名的文件夹,例如 100038、2299、98560 等。这些数字对应的是各个进程的 PID(进程标识符)。每个进程在内核中都有一个唯一的编号,即 PID,用来区分不同的进程。这些以数字命名的文件夹中记录了各个进程的相关信息。不同的信息通过不同的虚拟文件呈
PID算法原理介绍
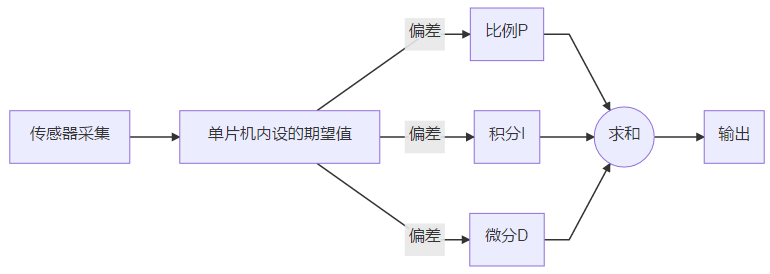
PID,就是“比例(proportional)、积分(integral)、微分(differential)”,是一种很常见的控制算法。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的
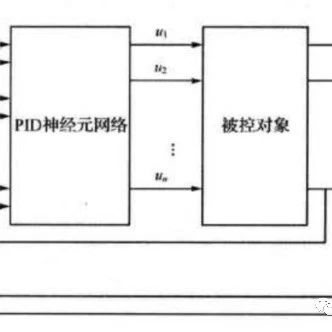
1 PID神经元网络结构PID神经元网络从结构上可以分为输入层、隐含层和输出层三层,n 个控制量的 PID神经元网络包含 n个并列的相同子网络,各子网络间既相互独立,又通过网络连接权值相互联系每个子网络的输入层有两个神经元,分别接收控制量的目标值和当前值。每个子网络的隐含层由比例元积分元和微分元构成
PID算法 是控制算法中的经典算法,特别是在一个闭环控制系统中更为常用。自己曾是第十三届全国大学生“恩智浦”杯智能汽车竞赛的参赛选手,相信所有的选手在电机控制算法上大多都是用PID算法,本想好好使用这种算法,却无奈没有学过。而网上查阅资料却又是基本都是一些苦涩难懂数学公式和脍炙人口的一些PID语句,

PID控制参数整定