扫码关注
扫码关注

























如果你大概看过几篇ADAS(高阶辅助驾驶)相关的文章或者看过某些新车对于ADAS功能的介绍,车载毫米波雷达这个零部件名词绝对算不上陌生,看到的频率估计也处在高位。
那么这种近几年出现频次爆发式增长的零件到底是什么东西?在车上安装位置又都放在哪?其作用又是什么?今天带着这些问题,好好聊一下车载毫米波雷达的那些事。
什么是毫米波雷达?
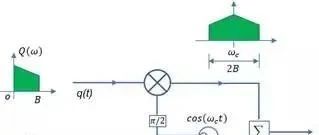
顾名思义,毫米波雷达就是工作在毫米波频段的探测雷达,其频段介于30-300GHz,波长1-10mm,主要用来探测距离、角度以及通过不同时间的距离计算相对速度。
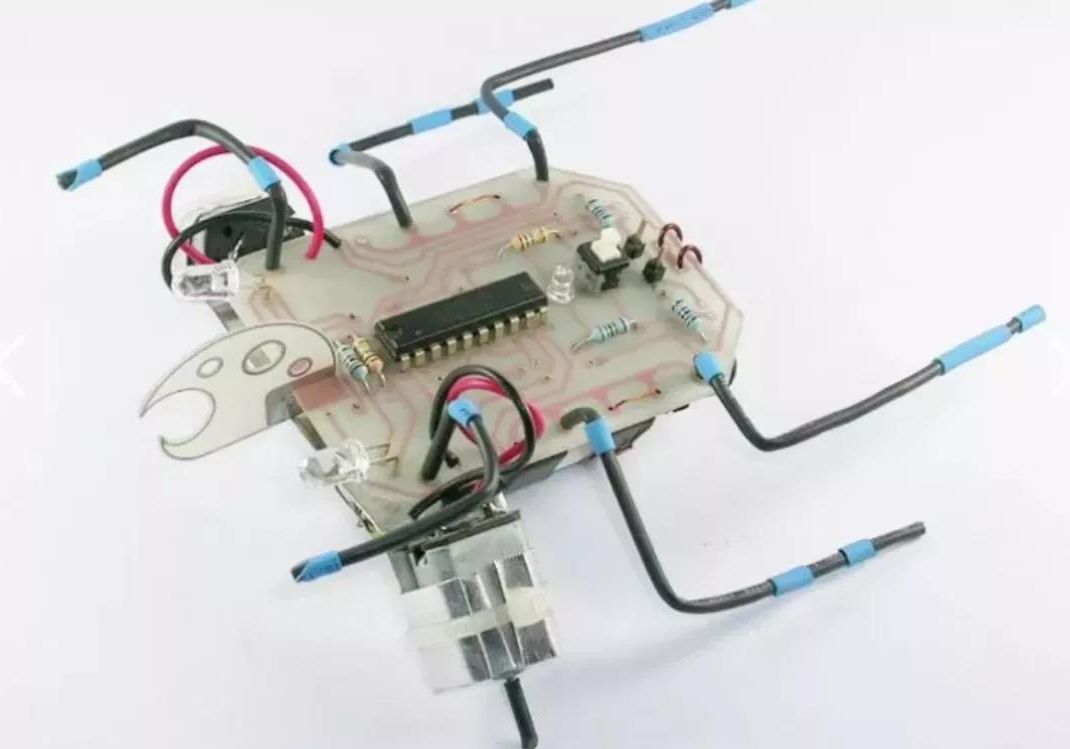
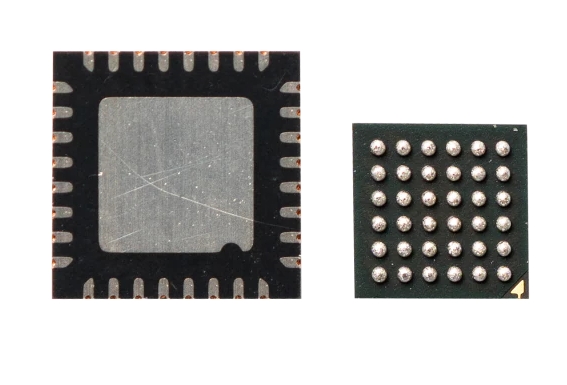
车载级别的毫米波雷达通常长下面这样。

毫米波雷达有哪些种类?
车载毫米波雷达当前主要以工作频率进行分类,主要集中在24G、60G、77G、79GHz。
这些工作频段并非单纯地由OEM或者设备零部件供应商控制,而是有专门对应的国家法规,毕竟雷达的频率在任何一个国家都是要受到严格管控的。
另外毫米波雷达也会根据工作模式分类,有脉冲类型和连续波类型。
顾名思义前者间歇性发波,后者连续向外发波探测物体位置,前者由于功能效果一般,基本已经淘汰。
后者又大致分为CW(恒频连续波,只能测速不能测距)、FSK(频移键控连续波、可探测单个目标的具体和速度)、FMCW(调频连续波,可对多个目标实现测距和测速)几种,功能随顺序递进,当然成本也是递进。
毫米波雷达一般布置在汽车上什么位置?
考虑到毫米波雷达主要用来探测前后车距离以及角度,所以其在大多数产品上安装在正面。
一部分车型集成在Logo后方,考虑到信号质量要得到保证,这部分车型的Logo表面大多非常光滑,没有传统Logo设计的那种立体效果。
另一部分车型安装在正面保险杠中央位置,这种安装方式比较简单直接,信号质量也有所保证。
但考虑到其安装位置过于靠下,所以应用车型大多数是SUV等离地间隙稍高的产品。
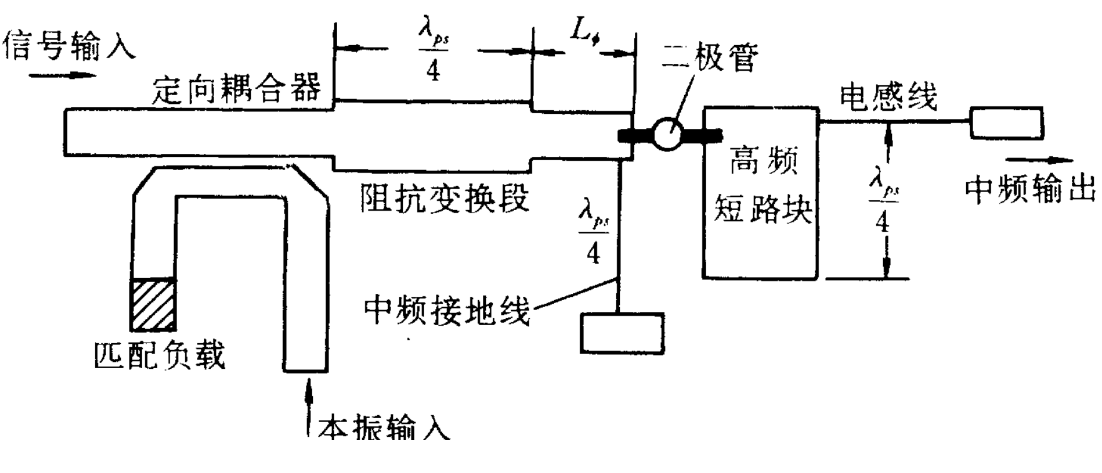
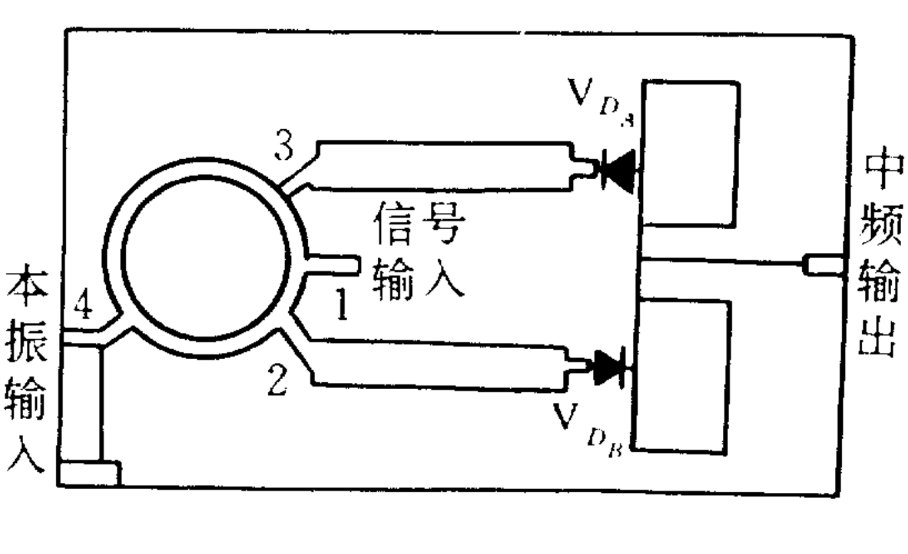
毫米波雷达的工作原理是怎样的?
与所有雷达一样,毫米波雷达工作原理也是通过振动器向外发波,碰到物体之后反弹,被接收天线接收,在采样、滤波、转换之后,根据时间差计算前车的距离。
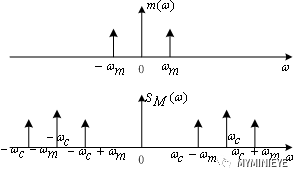
当然,当前大多数车载毫米波雷达也能一同将车速计算出来,原理是发出的毫米波并非定频,而是发射波形频率根据时间变化,即变频。
这样可以根据返回的波形时间差及周期长度根据多普勒效应计算车速。
毫米波雷达如何应用在智能网联汽车上?
毫米波雷达在车辆上大多场景下只与两个功能相关,一是ACC巡航,二是AEB主动刹车。
其中ACC巡航需要毫米波雷达将前车的距离及两车之间的速度差判定车速判定是否处在合理区间,发生过近或者前车车速过慢及时减速,与前车保持固定车距,即跟车行驶。
如果前方未检出有车辆那就相当简单,按照设定的车速行驶即可。
而AEB主动刹车比较简单,如果由于前方车辆过慢或前方有异物,经过距离判定之后直接以最大力度进行刹车制动,一方面避免事故,另外如果避免不了也能降低一些事故后果,以提升驾驶的安全性。
结束语
看似毫米波雷达功能繁多,重要性也相当强悍,但其功能和产品仍然存在较大的优化和迭代空间,当然考虑到其功能相对单一,在视觉方案和激光雷达普及之后,毫米波雷达或许会从当下这个占主导地位身份降低到辅助作用。但不管毫米波雷达如何发展,自动驾驶等级势必是会逐渐提高的,L2.5、L3是基本,L4才是ADAS的最终形态。
此文内容来自二师兄玩车,如涉及作品内容、版权和其它问题,请于联系工作人员,我们将在第一时间和您对接删除处理!