扫码关注
扫码关注
























传感器作为物联网的“感知神经”,其数据质量直接影响系统性能,但在实际应用中,原始数据常伴随噪声、误差与信息冗余等,需要通过算法优化。

1、降噪与滤波算法:剔除数据噪声
均值滤波
原理:对连续N个采样点取平均值,平滑高频噪声。
适用场景:随机高频干扰(如温度传感器波动)。
局限:信号滞后,N越大响应越慢。
中值滤波
原理:对N个采样点排序后取中值,抑制脉冲噪声。
适用场景:突发干扰(如振动传感器受冲击)。
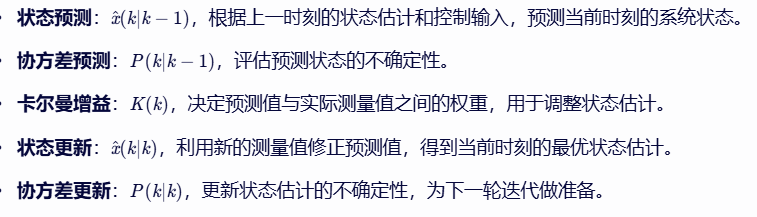
卡尔曼滤波
原理:基于“预测-更新”迭代,用最小均方误差估计最优状态。
适用场景:动态噪声处理(如GPS定位、速度传感器)。
小波变换滤波
原理:分解信号为不同尺度小波系数,阈值处理后重构。
适用场景:非平稳信号(如声传感器突发声音)。
2、校准与误差补偿算法:修正系统偏差
最小二乘拟合
原理:通过误差平方和最小化,拟合线性模型。
适用场景:线性校准(如压力传感器“压力-电压”曲线)。
多项式拟合
原理:用高次多项式拟合非线性“输入-输出”关系。
适用场景:非线性误差补偿(如红外温度传感器宽温区修正)。
温度补偿算法
原理:建立“温度-误差”模型(如线性回归、神经网络),实时修正漂移。
适用场景:温度敏感传感器(如应变片、热电偶)。
3、多传感器融合算法:提升数据鲁棒性
加权平均法
原理:根据传感器精度分配权重,加权求和。
适用场景:简单冗余传感器融合(如多温度传感器测平均值)。
贝叶斯推理
原理:基于先验概率和观测概率,计算后验概率。
适用场景:概率性误差数据(如红外与视觉传感器目标位置融合)。
粒子滤波
原理:用随机样本近似后验概率分布,通过重采样保留有效粒子。
适用场景:复杂动态系统(如无人机GPS+IMU+视觉位姿估计)。
4、特征提取与模式识别算法:从数据到决策
傅里叶变换
原理:将时域信号转换为频域,提取频率特征。
适用场景:周期性信号分析(如振动传感器故障共振频率)。
主成分分析(PCA)
原理:线性变换降维,保留方差最大主成分。
适用场景:多参数传感器特征压缩(如气味传感器阵列气体识别)。
支持向量机(SVM)
原理:核函数映射到高维空间,找到最优分类超平面。
适用场景:传感器数据分类(如压力传感器触摸手势识别)。
五、特定应用算法:场景化定制
四元数姿态解算
原理:用四元数表示旋转,避免欧拉角“万向锁”。
适用场景:IMU(加速度计+陀螺仪)姿态角计算。
阈值检测
原理:设定信号强度阈值,判定物体存在。
适用场景:接近传感器(如红外对管)物体检测。
本文凡亿教育原创文章,转载请注明来源!