扫码关注
扫码关注

























继续学习,继续看书,继续动脑子。
上期已经说明了开关电源满足三个条件之后,可以看成是线性的了,那么这期就来看看开关电源的系统框图。
一个坑
我一开始就掉进一个坑:系统框图的输入量为什么不是Vi,而是参考电压Vref?参考电压不是固定的吗?也能作为输入?
反馈控制系统的输入量
我有这个问题,是因为我大学课表里面没有《自动控制原理》,如果学过的话应该就不会有这个问题了。
开关电源是一个自动控制系统,采取的是反馈控制的方式,是一个反馈控制系统。
下面这两段话是教材《自动控制原理》的,我挪过来直接用了。
1、反馈控制方式是按照偏差进行控制的,其特点是不论什么原因使被控量偏离期望值而出现偏差的时候,必定会产生一个相应的控制作用去减小或消除这个偏差,使被控量与期望值趋于一致。
2、加到反馈控制系统上的外作用有两种类型,一种是有用输入,一种是扰动。有用输入决定系统被控量的变化规律,如输入量;而扰动是系统不希望有的外作用,它破坏有用输入对系统的控制。
仔细想想,对于我们的buck电源来说,我们的目的并不是说输出Vo要随电源Vi的不同而不同,而是不论输入Vi是多少,都只有一个目的,那就是Vo恒定。
比如我们的5V转3.3V的BUCK,是有反馈的,不管是因为什么变化,只要输出电压Vo偏离了3.3V,那么反馈Vfb与期望值Vref就会有偏差,然后系统就会根据这个偏差调节开关电源的占空比,让Vfb朝着期望值Vref变化,最终的结果就是保证了输出还是3.3V。总之,目的就是保证Vo时刻为3.3V。
总之,稳定状态下,输出是不变的,或者说系统时刻自动调节,向设定的输出值而努力着。
可以想到,输出量不变的原因,就是因为始终有一个不变的输入量,这个输入量就是Vref,它就是反馈控制系统的有用输入。
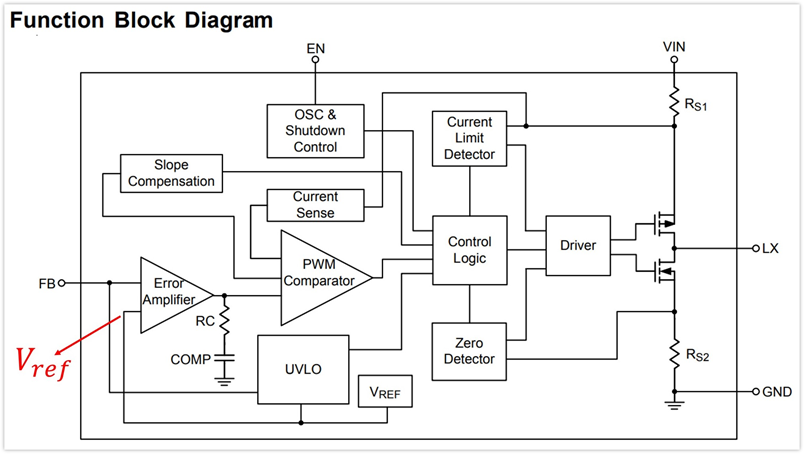
那输入电压Vi是什么呢?
Vi我觉得可以理解为系统工作的条件,一个恒定不变的Vi输入电压,与系统的稳定工作时所处的状态是有关系的。比如同一个3.3V输出的BUCK电路,5V输入和10V输入,尽管都能输出3.3V,也都是稳定工作的,但是所处状态不同,占空比不一样,传递函数也不同。
如果要类比的话,我觉得这个直流输入Vi可以看作是静态工作点。兄弟们可以体会下,静态工作点是三极管的工作条件,然后输入一般认为是交流小信号,三极管放大电路对应的放大倍数一般也是针对交流小信号说的。
另外一方面,现实中buck的Vi也会有噪声,这些噪声可以理解为扰动输入,对应三极管电路的小信号。
当然,开关电源的扰动可以有很多,常见的有Vi的电压波动,还有负载电流的突然变化,它们也是现实电路中存在的。另外还有温度上升下降,导致器件参数发生变化,外部辐射干扰等等。这些都可能会干扰系统运行。
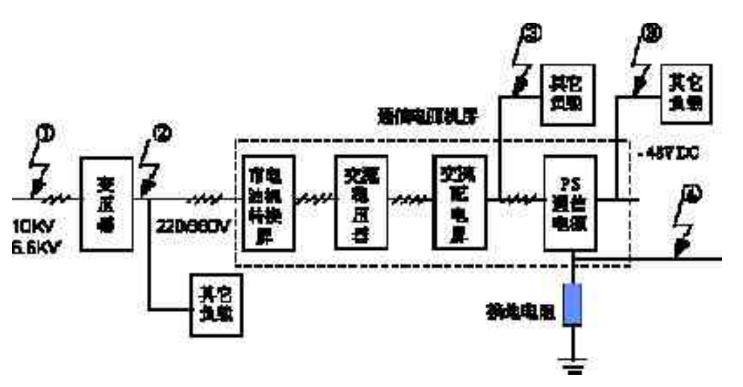
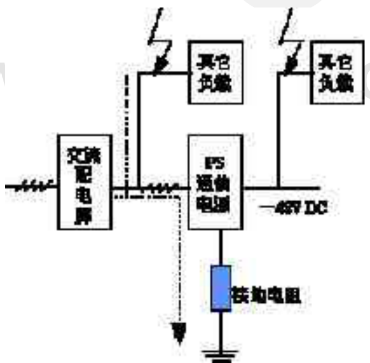
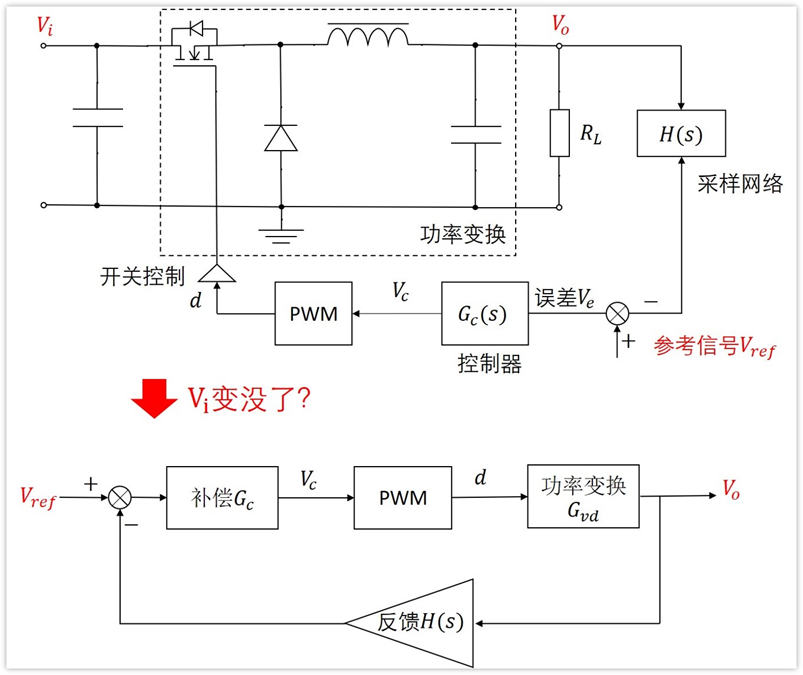
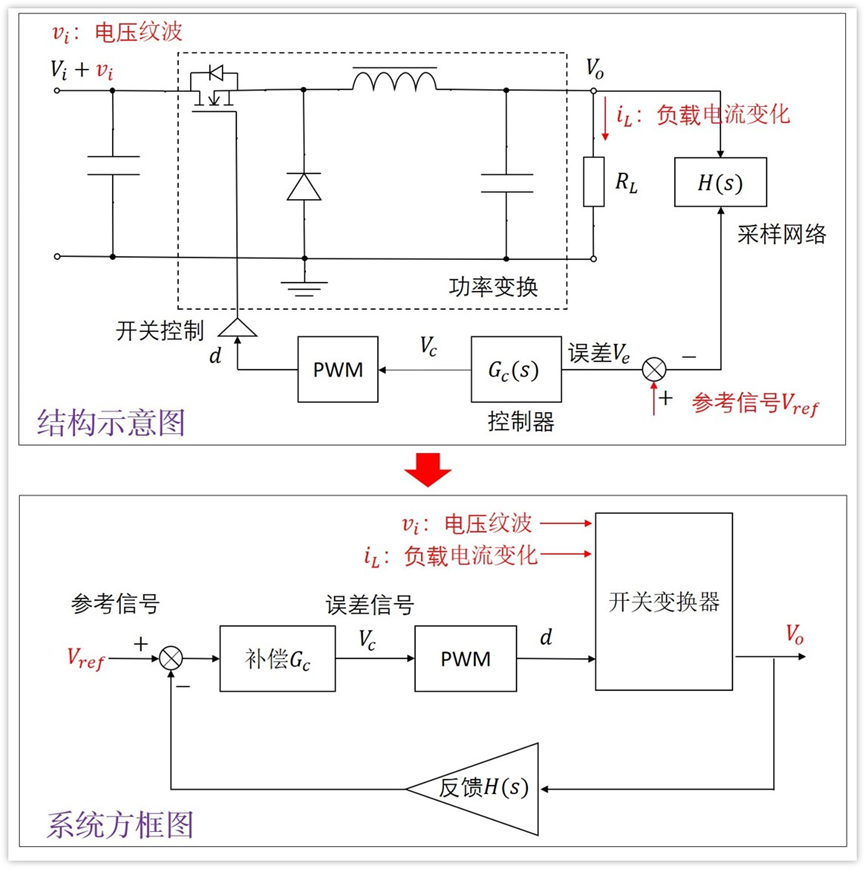
经过上面的分析,我们可以根据结构示意图画出系统的框图如下:
当然,如果vi作为输入信号已经在脑子里面根深蒂固了也没关系。
我们就这么看,当输入Vi突然发生变化,那么它必然会影响到Vo,Vo发生变化,那么Vref与反馈就有了差值,差值再通过补偿电路得到误差信号,误差信号又去改变PWM占空比,进而调节开关变换器,让Vo朝着目标值改变。
同样的,如果负载电流突然发生变化,也会直接影响到Vo,同样也是一级一级过来,系统会调节Vo朝着目标值改变。
仔细想想,这里面最关键的是不是下面这么一个环?
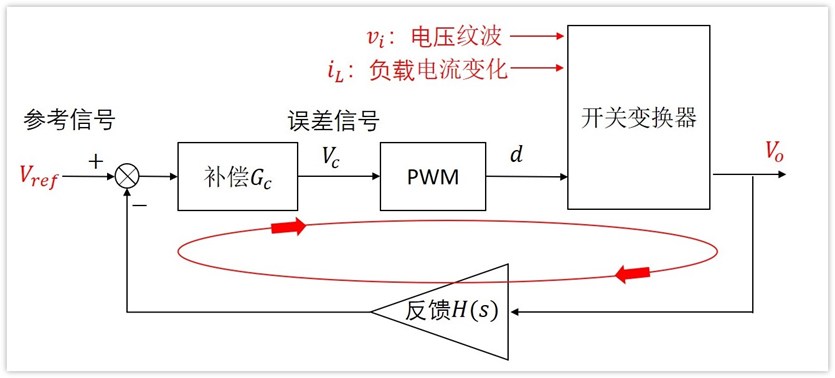
如这个环够牛逼,不管输入到系统的干扰有多强,输入电压怎么波动,负载电流怎么变,都能马上准确无误的调整出Vo为预设值,那这个系统就是铁打的,金刚不坏。
但实际上,这显然是不可能的,信号要一级一级的传递,总会有延迟。
比如刚开始时,如果Vi增大,那么Vo也增大,系统会往Vo减小的方向调整,但是因为调整需要时间,如果还没调整完,Vi又减小了,系统又需要往反方向调整。这样就有可能造成你需要我大时我减小,你需要我小时我又增大了,永远都跟不上节奏,更甚者系统可能就崩了。
从上面一段话,我们应该可以看出2层意思:
1、系统的响应速度:有干扰信号进入系统时,系统调整需要时间,也就是有延迟,如果调整时间太长,那么响应速度必然就慢。
2、系统的稳定性:系统不管怎么样,都不能崩了,导致振荡Vo不能稳定吧
要准确的判断一个系统怎么样,肯定不能仅仅就靠这些文字描述,定性分析下完事,我们肯定要定量分析,那么就要拿出我们之前说的传递函数了。
系统框图
我们去掉干扰输入信号,只看最关键的环的框图,然后评估这个环的性能就可以了。
最终画出系统框图如下:
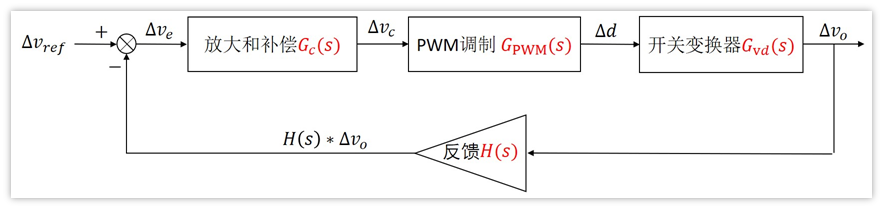
可以看到,框图的符合我又有了调整,都带上了△符号,表示小信号,意思相对于稳态时的变化量。
之所这样,是因为系统要线性化,必须有一个条件,那就是小信号假设,如果不明白,可以看上一期内容《开关电源环路学习笔记(2)-线性条件》
另外可能有2个问题:
1、Vref不是恒定的吗?怎么还会有波动量△Vref呢?
2、干扰信号怎么没了,扔掉了?
我是这么看的,干扰信号太多了,我们不可能列出所有的。
但是确认一点就是,任何干扰信号输入,作用在系统上的结果都是让Vo发生了变化,Vo经过反馈级和Vref做比较,得到误差信号△Ve,然后系统根据这个误差信号去做调整。
另一方面,误差△Ve,它是Vref和Vo经过反馈网络之后的信号相减得到的。
原本的系统Vref是不变的,干扰有输入。现在假定没有干扰,而Vref有变动的信号△Vref,效果应该是一样的。反正它们都是相减的关系。
意思大致如下图:
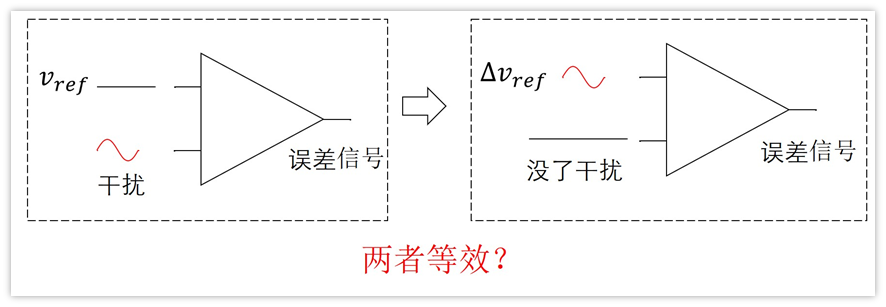
不知道对不对,极可能是胡说八道,请自行判断。。。
框图简化
系统框图已经有了,那如何分析呢?我们先把框图简化一下,这样会比较简单明了。
简化其实就是将放大和补偿级,PWM调制级,开光变换器这三级合并,它们会是相乘的关系,合并过程如下图。
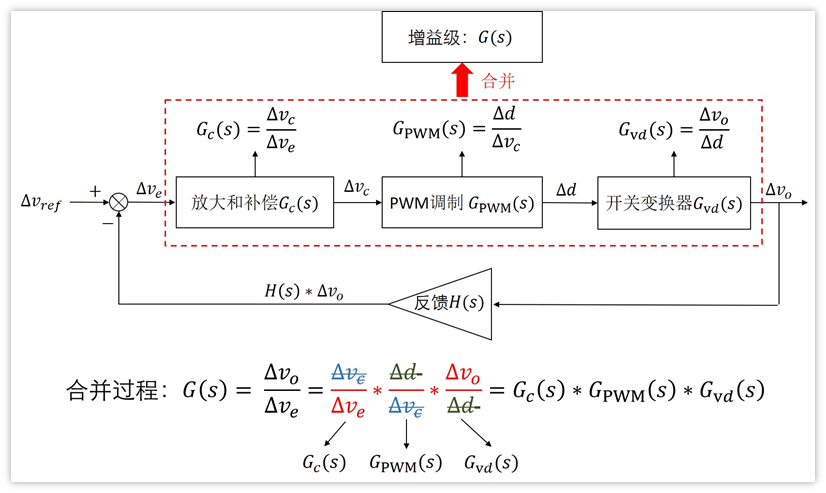
三级合并之后取个新名字,叫增益级G(s)。
简化后的框图
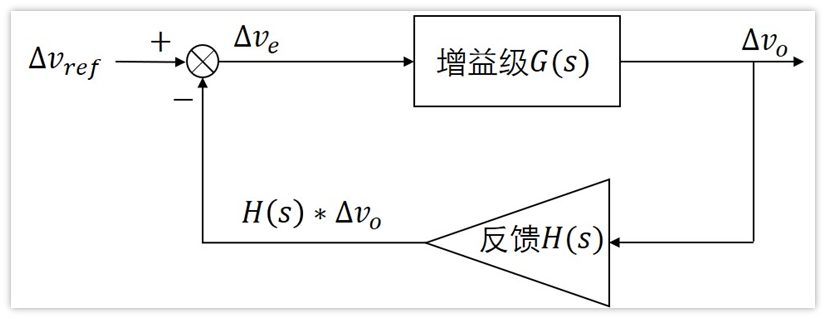
简化后的框图非常的清晰明了,我们可以分别写出闭环传递函数和开环传递函数。
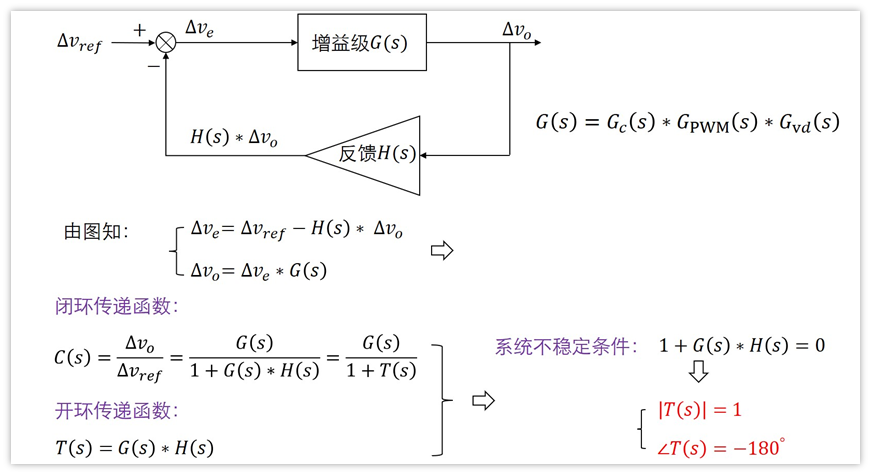
按道理来说,判断系统稳不稳定,只需要分析闭环传递函数就可以了,显然,传递函数分母为0的时候,意味着只要有一点点输入信号,那么输出信号就是无穷大的,即不稳定。
但是如果有一定经验的话,就会知道,我们通常画的波特图并不是闭环传递函数C(s),而是开环传递函数T(s),这是为什么呢?
这是因为我们画的波特图通常是对数坐标,而开环传递函数的表达式就是各级相乘的关系,幅度取对数之后变成相加的关系,同时相位也是相加的关系。
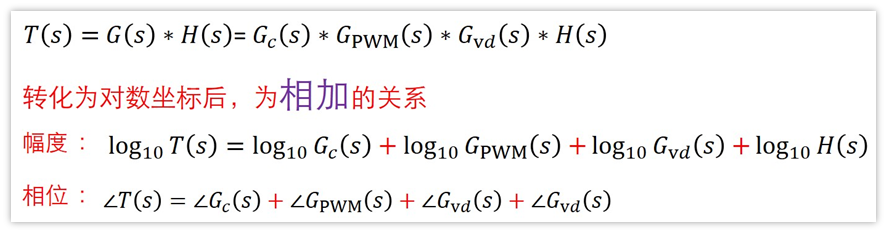
这对于分析问题来说简直不要太方便,我们可以单独分析各级的传递函数,就可以知道它们对整个系统所起的作用了。
而闭环传递函数取对数之后是这个:log(C(s))=log(G(s)/(1 T(s))),各级之间区分不开,难以分析。
以上内容纯属个人看法,无法保证准确性,建议兄弟们持怀疑的态度去看。如果发现问题也请留言指出来,大家一起进步