扫码关注
扫码关注
























自动驾驶的线控底盘就是我们通常意义上的手和脚,用来做控制执行,是自动驾驶控制技术的核心硬件。
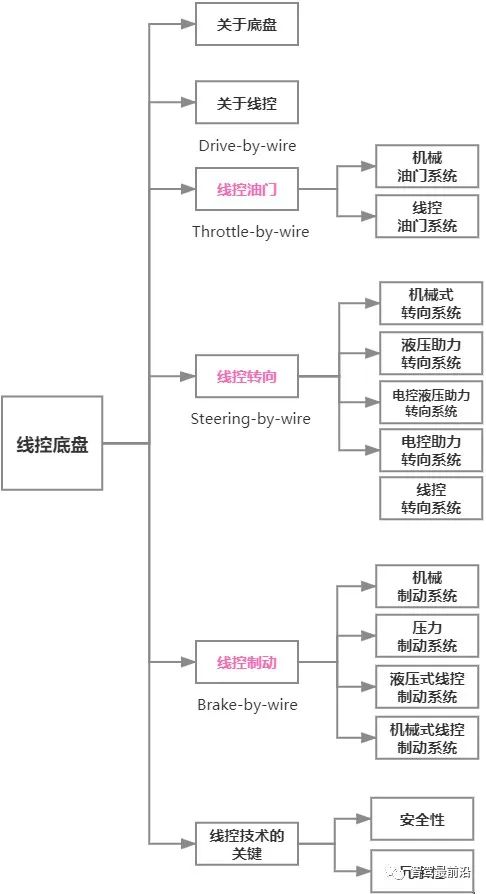
本文知识概念图,仅供参考
关于底盘
说到汽车底盘,我们并不陌生。一般由悬置系统、进排气系统、传动系统、燃油系统、排挡踏板系统、悬架系统、转向系统、车轮轮胎系统、制动系统等子系统构成。
关于线控
线控=Drive-by-wire 或 X-by-wire,即用线(电信号)的形式来取代机械、液压或气动等形式的连接,从而不需要依赖驾驶员的力或者扭矩的输入。
线控系统主要有五大子系统:线控转向,线控油门,线控制动,线控悬架,线控换挡。
其中,对于自动驾驶系统来说,线控油门、线控转向、线控制动这三个子系统尤其重要。
线控油门(TBW)
线控油门=TBW,即Throttle-by-wire,或称作Accelerate-by-wire。
发展
机械→电子(线控)
在早期的传统汽车上,油门控制是通过拉索或者拉杆连接油门脚踏板和节气门(throttle)连动版而工作,这样通过机械装置来控制节气门的方法我虽然反应延迟小,但也有很大的局限性,没有办法应对复杂道路下的各种工况,也无法很好地控制油耗和排放。
 机械油门
机械油门
然后产生了线控油门(即电子油门),通过用导线来代替拉索或者拉杆,由油门踏板位置产生的电信号给ECU来进行发动机控制。取消了踏板和节气门之间的机械连接,而是通过检测油门脚踏板的位移(这个位移代表了驾驶员的驾驶意图),把该位移信号传递给ECU,进行计算处理得到最佳的节气门开度,再驱动节气门控制电动机。线控油门系统主要由油门踏板和位移传感器、ECU(电控单元)和数据总线(负责与其他ECU间的通信)、电动机和节气门构成。
 线控油门
线控油门
原理
主控电脑如何控制油门呢?最常用的方法是在油门脚踏板和ECU之间接入一个专用的控制器,当处于自动驾驶模式时,控制器会接受主控电脑的信号传输给ECU;而未启动自动驾驶模式的,控制器仅仅作为一个继电器将油门踏板的电信号传输给ECU。
 线控油门实现自动驾驶
线控油门实现自动驾驶
应用
巡航定速则是线控油门的基础应用,凡具有定速巡航功能的车辆都配备有线控油门。从发展阶段来看,目前线控油门渗透率接近100%,相对处于较成熟阶段。就算是传统燃油车,线控油门也基本是标准配置,而混合动力和电动汽车更是完全采用线控油门。因此在自动驾驶的应用中,线控油门的改装与实现也相对容易。
除了国外供应商(博世、大陆、电装、Magneti-Marelli、日立、Delphi Technologies、SKF等)外,国内供应商(海拉、联电、宁波高发、奥联电子、凯众股份等)也有所参与。但是,电喷执行机构、ECU等技术均掌握在国际零部件巨头手中,产业格局较稳定,因此国内企业的参与度还处于较低的状态,国产化是未来的线控油门领域的努力方向。
线控转向(SBW)
线控油门=SBW,即Steering By Wire,线控转向系统掌控着自动驾驶路径与方向的精确控制。
发展
转向系统完成了机械式→液压助力→电控液压助力→电动助力的一系列进化。
・机械式转向系统(MS)
机械式转向系统=Manual Steering,是最早的汽车转向系统。所谓机械式,即以驾驶员的力为基础,借助方向盘、转向器和转向传动机构等全机械机构实现转向。通过转动方向盘,转向器中的减速器放大力矩,再由拉杆控制转向节完成车辆转向。
优点:MS系统性能可靠、结构简单。缺点:由于地面对轮胎的反作用力直接传动到方向盘,导致在泊车和低速行驶时方向盘负担过于沉重。
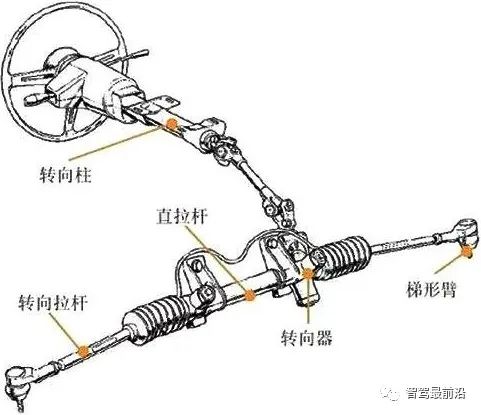
机械式转向系统
・液压助力转向系统(HPS)
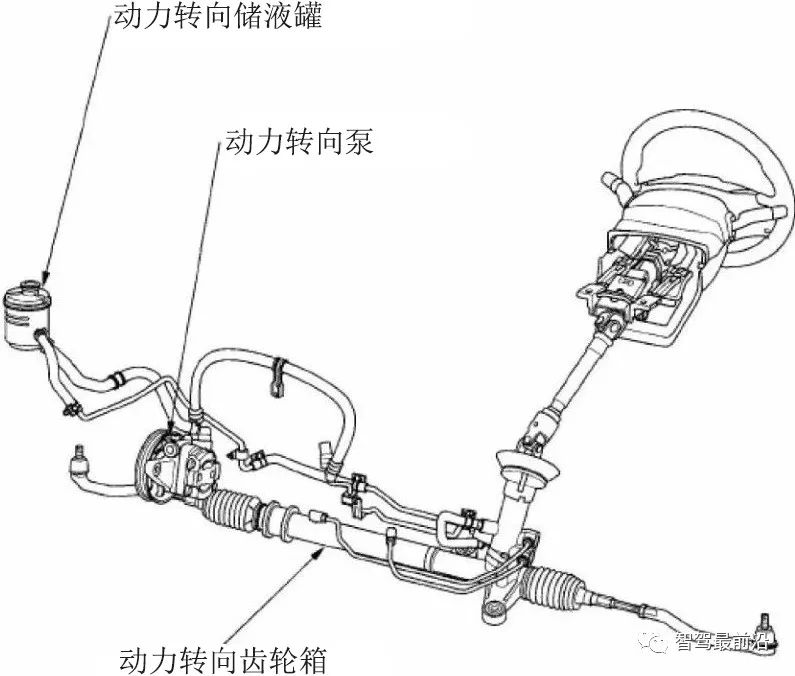
液压助力转向系统=Hydraulic Power Steering,主要由油泵、油管、油罐、压力流体控制阀、传动皮带等组成。HPS系统动力源是发动机,驾驶员仅需轻微用力就能转动方向盘,利用发动机的动力带动油泵,转向控制阀控制油液流动的方向和油压大小,给机械转向提供转向助力。
优点:HPS系统在中低车速时有较好的助力性和操纵稳定性。缺点:在高速行驶时,由于方向盘给驾驶员力量反馈太小,导致驾驶员的路感较差,固定的助力效果会使转向盘过于灵敏。其次,为了保持压力,不论是否需要转向助力,发动机始终带动油泵旋转,造成了发动机能量的浪费。
液压助力转向系统
・电控液压助力转向系统( EHPS)
电控液压助力转向系统=Electro Hydraulic Power Steering,与HPS系统相比,EHPS增加了电控单元,包括动力转向ECU、电磁阀和车速传感器等。通过车速传感器对车速的实时监控,电控单元获取数据后通过控制转向控制阀的开启程度改变油液压力,从而实现转向助力力度的大小调节。
优点:EHPS系统可以根据车速而改变提供转向助力的大小,使得高速行驶时,车身更稳,手感更好。缺点:其结构复杂、造价较高,具有液压系统所带来的通病,是介于液压助力和电动助力之间的过渡阶段。

电控液压助力转向系统
・电动助力转向系统( EPS)
电动助力转向系统=Electric Power Steering,主要由ECU、转向扭矩传感器、助力电动机和减速机构等组成。其原理是,驾驶员在转动方向盘时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到ECU,ECU根据转矩传感器检测到的信息进行计算并向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生助力。EPS系统根据助力电机的安装位置不同,又可分为转向轴助力式、齿轮助力式、齿条助力式三种形式。
优点:结构紧凑,所占空间小,零部件结构简单、安装方便,维护费用低;以电动机为动力,电动机只在需要时才启动,耗用电能较少,提高了汽车的燃油经济性;可实时地在不同的车速下为汽车转向提供不同的助力,保证汽车在低速行驶时轻便灵活,高速行驶时稳定可靠;助力大小可以通过软件调整,能够兼顾低速时的转向轻便性和高速时的操纵稳定性,回正性能好。

电动助力转向系统
・线控转向系统(SBW)
线控转向系统=Steering By Wire,是在EPS上发展起来的,SBW相对于EPS具有冗余功能,并能获得比EPS更快的响应速度。对于L3及以上的自动驾驶汽车来说,部分会脱离驾驶员的操控,因此自动驾驶驾驶控制系统对于转向系统等要求控制精确、可靠性高,只有线控转向可以满足要求,因此成为转向系统未来的发展趋势。
原理
线控转向系统是指,在方向盘和转向齿条之间是通过线控(电子信号)连接和控制的转向系统,即在它们之间没有直接的液力或机械等物理连接。线控转向系统主要分为三个部分:①转向盘系统,包括转向盘、转矩传感器、转向角传感器、转矩反馈电动机和机械传动装置;②电子控制系统,包括车速传感器,也可以增加横摆角速度传感器、加速度传感器和电子控制单元以提高车辆的操纵稳定性;③转向系统,包括角位移传感器、转向电动机、齿轮齿条转向机构和其他机械转向装置等。
首先,方向盘将驾驶者的转向意图通过传感器转换成数字信号,随后传递给转向齿条执行机构。同时,根据不同的车速及驾驶工况提供模拟的方向盘力矩反馈,从而实现方向盘的回正以及驾驶手感等功能。转向齿条执行机构则从方向盘执行机构接受信号,并根据驾驶员的转向意图将方向盘角度信号转换成轮胎的摆动。给助力电机发送电信号指令,从而实现对转向系统进行控制。
EPS(电动助力转向)与SBW(线控转向)的区别又是什么呢?
SBW取消了方向盘与车轮之间的机械连接,用传感器获得方向盘的转角数据,然后通过ECU处理计算并输出驱动力数据,用电机推动转向机转动车轮。而EPS则根据驾驶员的转角来增加转向力。
优点:
省略了转向系功能模块间的机械连接,降低了噪声和震动;
节省了空间,以用来布置传感器、计算单元或其他娱乐系统高等;
消除了撞车事故中转向柱后移引起伤害驾驶员的安全隐患;
方向盘转角和转向力矩可以独立设计,实现适应不同类型的“手感”。
缺点:
在信息安全方面,存在被黑客攻击的风险。

线控转向系统
应用
从目前整个市场来看,线控转向尚处于发展早期阶段,目前渗透率极低,仅有少量车型配备,例如英菲尼迪Q50和Q60等装备了线控转向。线控转向系统对于技术、资本、安全等要求较高,预计短期内线控转向产品还将为博世、采埃孚等巨头所把控。随着L3及以上智能驾驶的逐步渗透,线控制动有望爆发。据相关机构预测,线控制动在2020-2025年的市场空间年均复合增速可达166%。
线控制动(BBW)
线控制动=Brake By Wire,在线控底盘技术中是难度最高的,但也是最关键的技术。线控制动系统掌控着自动驾驶的底盘安全性和稳定控制,只有拥有足够好的制动性能(包括响应速度快、平顺性好等),才能为我们的安全提供良好保障。
发展
与油门、转向技术的发展过程相似,制动技术经历了从机械制动到压力制动再到电子制动的发展过程。
・机械制动系统
机械制动系统的制动能量完全由驾驶员来提供,驾驶员操纵一组简单的机械装置向制动器施加作用力,从而达到制动的效果。
缺点:制动力不足。由于这个阶段的汽车还处于初级阶段,它们结构简单、质量小、低速,因此对制动力要求不高。而现在在普通汽车上已经完全找不到机械制动系统的身影了,而在一些低速的农用车、拖拉机上还在使用机械制动系统。
・压力制动系统
后来随着汽车质量越来越大,车速越来越快,开始出现压力助力装置。首先产生的是气压制动,即真空助力装置。利用压缩空气作动力源,将发动机带动空压机所产生的压缩空气的压力转变为机械推力,使车轮转动。
缺点:气压制动反应慢,制动力大却难控制。由于气压制动系统靠压缩空气助力,必须有空压机、贮气筒、制动阀等装置体积大,只有空间允许的车辆才能采用,多用于中、重型汽车。
随着液压技术的发展,液压制动系统得以实现。液压制动,是将驾驶员施压于制动踏板的力经过推杆传到主缸活塞从而压缩制动液,制动液经过油管加大制动轮缸的压力,轮缸活塞在压力作用下驱使制动蹄片压向制动鼓,在摩擦片的作用下使制动鼓减小转速或者停止转动,从而产生制动力。
缺点:制动操纵费力,且制动力没有气压制动得大;过度受热后,部分制动液汽化,在管路中形成气泡,严重影响液压传输,使制动系效能降低,甚至完全失效。优点:作用滞后时间较短;轮缸尺寸小,可以安装在制动器内部,直接作为制动蹄的张开机构或制动块的压紧机构,而不需要制动臂等传动件,使之结构简单,质量小;机械效率较高,且液压系统有自润滑作用。
・液压式线控制动(非纯线控)
由于防抱死制动系统(ABS)、车身稳定控制系统(ESP)等逐步产生,线控制动系统慢慢在传统的制动系统上发展起立。液压式线控制动EHB=Electro-Hydraulic Brake,以传统的液压制动系统为基础,用电子器件代了一部分机械部件的功能,使用制动液作为动力传递媒介,控制单元及执行机构布置的比较集中,有液压备份系统,也可以称之为集中式、湿式制动系统。
正常工作时,制动踏板与制动器之间的液压连接断开,备用阀处于关闭状态。电子踏板配有踏板感觉模拟器和电子传感器,ECU可以通过传感器信号判断驾驶员的制动意图,并通过点击驱动液压泵进行制动。电子系统发生故障时,备用阀打开,EHB系统变成传统的液压系统。
缺点:液压系统结构复杂;容易发生液体泄漏,存在安全隐患;成本和维护费用较高。
优点:由于具有备用制动系统,安全性较高,是现阶段的首选方案。
原理
已经普遍应用的液压制动现在已经是非常成熟的技术,随着人们对制动性能要求的提高,防抱死制动系统、驱动防滑控制系统、电子稳定性控制程序、主动避撞技术等功能逐渐融人到制动系统当中,并随着电动汽车的发展,制动系统的控制装置逐渐会电子化,电子化可以更加准确、更高效率地实现制动。 机械连接逐渐减少,制动踏板和制动器之间动力传递分离开来,取而代之的是电线连接,电线传递能量,数据线传递信号,所以这种制动叫做线控制动。
・线控制动EMB
EMB=Electro-Mechanical Brake,即机械式线控制动。EMB也被称为分布式、干式制动系统。和EHB的最大区别就在于它不再需要制动液和液压部件,制动力矩完全是通过安装在4个轮胎上的由电机驱动的执行机构产生。EMB系统的ECU根据制动踏板传感器信号及车速等车辆状态信号,驱动和控制执行机构电机来产生所需要的制动力。
优点:
响应速度大大提高;
简化了制动系统的结构、便于装配和维护;
随着制动液的取消,降低了环境污染。
缺点:
对可靠性要求很高,需要备份系统来保证可靠性;
电机功率限制动力不足;
工作环境恶劣,刹车片附近的半导体部品无法承受高温。
这些问题都阻碍了EMB系统在短期内的量产。目前EMB还处在研究阶段,但是EMB是未来的发展方向。
应用
现阶段,混动车基本都采用高压蓄能器为核心的EHB,电动车基本都采用EHB。从目前整个市场来看,线控制动尚处于发展早期阶段,目前渗透率较低,仅有少量车型配备,新能源汽车配置率相对较高。随着新能源汽车、L3及以上自动驾驶的逐步渗透,线控制动有望爆发。据相关机构预测,线控制动2020-2025年市场空间年均复合增速可达23%。
主要供应商包括博世、采埃孚、大陆等国际零部件巨头,目前国内发展相对较好的有伯特利、拓普集团、万安科技等,但产业尚处于发展早期阶段,还有望在未来的市场竞争中获得一席之地。
线控技术的关键:安全和冗余
从已经较成熟的线控油门,到市场渗透率仍然较低的线控转向,再到还在研究阶段的线控制动,我们已经有了大概的了解。总的来说,线控底盘技术正在不断发展。其中,安全性对于汽车尤其是L3以上的自动驾驶,是最基础也是最核心的要素。曾经的纯机械式控制虽然效率低,但可靠性高;线控技术虽然适用于自动驾驶,但同时也面临电子软件的故障所带来的隐患。只有实现功能上的双重甚至多重冗余,才能保证在一定的故障时仍可实现其基本功能。
转载自每日自动驾驶,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。-- END --