扫码关注
扫码关注























#include
#include
#include "Keypad.h"
#define uchar unsigned char
#define uint unsigned int
//data array maxium length
#define MAX_LEN 16
/////////////////////////////////////////////////////////////////////
//set the pin
/////////////////////////////////////////////////////////////////////
const int chipSelectPin = 10;
const int NRSTPD = A7;
const int Buzzer=A4;
const int led1=A0;
const int led2=A1;
const int led3=A2;
const int led4=A3;
/************************************************************************************/
uchar k=0;
uchar m=0;
uchar q=0;
uchar Warning=0;
uchar i=0;
uchar j=0;
uchar b[5]={4,8,6,9};
uchar a[5]={0,0,0,0};
const byte ROWS = 4;
const byte COLS = 4;
char keys[ROWS][COLS] = {
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}
};
byte rowPins[ROWS] ={2,A5,4,5};
byte colPins[COLS] = {6,7, 8, 9};
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS );
/******************************************************************************************/
//MF522 command bits
#define PCD_IDLE 0x00 //NO action; cancel current commands
#define PCD_AUTHENT 0x0E //verify password key
#define PCD_RECEIVE 0x08 //receive data
#define PCD_TRANSMIT 0x04 //send data
#define PCD_TRANSCEIVE 0x0C //send and receive data
#define PCD_RESETPHASE 0x0F //reset
#define PCD_CALCCRC 0x03 //CRC check and caculation
//Mifare_One card command bits
#define PICC_REQIDL 0x26 //Search the cards that not into sleep mode in the antenna area
#define PICC_REQALL 0x52 //Search all the cards in the antenna area
#define PICC_ANTICOLL 0x93 //prevent conflict
#define PICC_SElECTTAG 0x93 //select card
#define PICC_AUTHENT1A 0x60 //verify A password key
#define PICC_AUTHENT1B 0x61 //verify B password key
#define PICC_READ 0x30 //read
#define PICC_WRITE 0xA0 //write
#define PICC_DECREMENT 0xC0 //deduct value
#define PICC_INCREMENT 0xC1 //charge up value
#define PICC_RESTORE 0xC2 //Restore data into buffer
#define PICC_TRANSFER 0xB0 //Save data into buffer
#define PICC_HALT 0x50 //sleep mode
//THe mistake code that return when communicate with MF522
#define MI_OK 0
#define MI_NOTAGERR 1
#define MI_ERR 2
//------------------MFRC522 register ---------------
//Page 0:Command and Status
#define Reserved00 0x00
#define CommandReg 0x01
#define CommIEnReg 0x02
#define DivlEnReg 0x03
#define CommIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define Reserved01 0x0F
//Page 1:Command
#define Reserved10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define Reserved11 0x1A
#define Reserved12 0x1B
#define MifareReg 0x1C
#define Reserved13 0x1D
#define Reserved14 0x1E
#define SerialSpeedReg 0x1F
//Page 2:CFG
#define Reserved20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define Reserved21 0x23
#define ModWidthReg 0x24
#define Reserved22 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsPReg 0x28
#define ModGsPReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
//Page 3:TestRegister
#define Reserved30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define Reserved31 0x3C
#define Reserved32 0x3D
#define Reserved33 0x3E
#define Reserved34 0x3F
//-----------------------------------------------
Servo myservo;
//4 bytes Serial number of card, the 5 bytes is verfiy bytes
uchar serNum[5];
/************************************************************************************************************/
void led(uchar x )
{
switch(x)
{
case 1 : digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);break;
case 2 : digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);break;
case 3 : digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, HIGH);break;
case 4: digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);break;
}
}
/*********************************************************************************************************/
void LOCK_Open()
{
myservo.write(90); // sets the servo position according to the scaled value
delay(15);
digitalWrite(Buzzer,HIGH);
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
delay(500);
digitalWrite(Buzzer,LOW);
delay(3000);
myservo.write(0); // sets the servo position according to the scaled value
delay(15);
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
}
/**********************************************************************************************************/
void readKeyboard()
{
char key = keypad.getKey();
if (key!=NO_KEY)
{
switch(key)
{
case '1' : k=1;break;
case '2' : k=2;break;
case '3' : k=3;break;
case '4':k=4;break;
case '5':k=5;break;
case '6':k=6;break;
case '7':k=7;break;
case '8':k=8;break;
case '9':k=9;break;
case '*':k=10;break;
case '0':k=11;break;
case '#':k=12;break;
case 'A' : k=13;break;
case 'B' : k=14;break;
case 'C':k=15;break;
case 'D':k=16;m++;break;
default:break;
}
a[i]=k;
i++;
led(i);
Serial.println(k);
Serial.println(i);
if(i==4)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
i=0;
for(j=0;j<4;j++)
{
if(a[j]==b[j])
q++;
if(q==4)
{
LOCK_Open();q=0;
}
else if(j==3 )
{
Warning++;
q=0;
if(Warning==3)
{
Warning=0;
digitalWrite(Buzzer, HIGH);
delay(3000);
digitalWrite(Buzzer, LOW);
}
}
}
}
Serial.println(q);
}
}
/*************************************************************************************************************/
void setup()
{
Serial.begin(9600);
myservo.attach(3);
SPI.begin();
pinMode(Buzzer,OUTPUT);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode(led3,OUTPUT);
pinMode(led4,OUTPUT);
pinMode(chipSelectPin,OUTPUT); // Set digital pin 10 as OUTPUT to connect it to the RFID /ENABLE pin
pinMode(NRSTPD,OUTPUT); // Set digital pin 5 , Not Reset and Power-down
digitalWrite(chipSelectPin, LOW);
myservo.write(0); // sets the servo position according to the scaled value
delay(15);
digitalWrite(Buzzer, LOW);
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH); // Activate the RFID reader
MFRC522_Init();
}
/****************************************************************************************************************/
void loop()
{
uchar status;
uchar str[MAX_LEN];
readKeyboard();//读取键值
// Search card, return card types
status = MFRC522_Request(PICC_REQIDL, str);
if (status != MI_OK)
{
return;
}
// Show card type
ShowCardType(str);
//Prevent conflict, return the 4 bytes Serial number of the card
status = MFRC522_Anticoll(str);
// str[0..3]: serial number of the card
// str[4]: XOR checksum of the SN.
if (status == MI_OK)
{
Serial.print("The card's number is: ");
memcpy(serNum, str, 5);
ShowCardID(serNum);
// Check people associated with card ID
uchar* id = serNum;
if( id[0]==0x6B && id[1]==0x33 && id[2]==0xE5 && id[3]==0x16 )
{
LOCK_Open();
}
else if(id[0]==0x3B && id[1]==0xE6 && id[2]==0xD1 && id[3]==0x3B)
{
LOCK_Open();
}
else if(id[0]==0x3B && id[1]==0xE6 && id[2]==0xD1 && id[3]==0x3B)
{
LOCK_Open();
}
else if(id[0]==0x3B && id[1]==0xE6 && id[2]==0xD1 && id[3]==0x3B)
{
LOCK_Open();
}
else
{
digitalWrite(Buzzer, HIGH);
delay(500);
digitalWrite(Buzzer, LOW);
delay(500);
digitalWrite(Buzzer, HIGH);
delay(500);
digitalWrite(Buzzer, LOW);
delay(500);
}
}
MFRC522_Halt(); //command the card into sleep mode
delay(1000);
}
/************************************************************************************************************************************88/
/*
* Function:ShowCardID
* Description:Show Card ID
* Input parameter:ID string
* Return:Null
*/
void ShowCardID(uchar *id)
{
int IDlen=4;
for(int i=0; i
Serial.print(0x0F & id[i],HEX);
}
Serial.println("");
}
/*
* Function:ShowCardType
* Description:Show Card type
* Input parameter:Type string
* Return:Null
*/
void ShowCardType(uchar* type)
{
Serial.print("Card type: ");
if(type[0]==0x04&&type[1]==0x00)
Serial.println("MFOne-S50");
else if(type[0]==0x02&&type[1]==0x00)
Serial.println("MFOne-S70");
else if(type[0]==0x44&&type[1]==0x00)
Serial.println("MF-UltraLight");
else if(type[0]==0x08&&type[1]==0x00)
Serial.println("MF-Pro");
else if(type[0]==0x44&&type[1]==0x03)
Serial.println("MF Desire");
else
Serial.println("Unknown");
}
/*
* Function:Write_MFRC5200
* Description:write a byte data into one register of MR RC522
* Input parameter:addr--register address;val--the value that need to write in
* Return:Null
*/
void Write_MFRC522(uchar addr, uchar val)
{
digitalWrite(chipSelectPin, LOW);
//address format:0XXXXXX0
SPI.transfer((addr<<1)&0x7E);
SPI.transfer(val);
digitalWrite(chipSelectPin, HIGH);
}
/*
* Function:Read_MFRC522
* Description:read a byte data into one register of MR RC522
* Input parameter:addr--register address
* Return:return the read value
*/
uchar Read_MFRC522(uchar addr)
{
uchar val;
digitalWrite(chipSelectPin, LOW);
//address format:1XXXXXX0
SPI.transfer(((addr<<1)&0x7E) | 0x80);
val =SPI.transfer(0x00);
digitalWrite(chipSelectPin, HIGH);
return val;
}
/*
* Function:SetBitMask
* Description:set RC522 register bit
* Input parameter:reg--register address;mask--value
* Return:null
*/
void SetBitMask(uchar reg, uchar mask)
{
uchar tmp;
tmp = Read_MFRC522(reg);
Write_MFRC522(reg, tmp | mask); // set bit mask
}
/*
* Function:ClearBitMask
* Description:clear RC522 register bit
* Input parameter:reg--register address;mask--value
* Return:null
*/
void ClearBitMask(uchar reg, uchar mask)
{
uchar tmp;
tmp = Read_MFRC522(reg);
Write_MFRC522(reg, tmp & (~mask)); // clear bit mask
}
/*
* Function:AntennaOn
* Description:Turn on antenna, every time turn on or shut down antenna need at least 1ms delay
* Input parameter:null
* Return:null
*/
void AntennaOn(void)
{
uchar temp;
temp = Read_MFRC522(TxControlReg);
if (!(temp & 0x03))
{
SetBitMask(TxControlReg, 0x03);
}
}
/*
* Function:AntennaOff
* Description:Turn off antenna, every time turn on or shut down antenna need at least 1ms delay
* Input parameter:null
* Return:null
*/
void AntennaOff(void)
{
ClearBitMask(TxControlReg, 0x03);
}
/*
* Function:ResetMFRC522
* Description: reset RC522
* Input parameter:null
* Return:null
*/
void MFRC522_Reset(void)
{
Write_MFRC522(CommandReg, PCD_RESETPHASE);
}
/*
* Function:InitMFRC522
* Description:initilize RC522
* Input parameter:null
* Return:null
*/
void MFRC522_Init(void)
{
digitalWrite(NRSTPD,HIGH);
MFRC522_Reset();
//Timer: TPrescaler*TreloadVal/6.78MHz = 24ms
Write_MFRC522(TModeReg, 0x8D); //Tauto=1; f(Timer) = 6.78MHz/TPreScaler
Write_MFRC522(TPrescalerReg, 0x3E); //TModeReg[3..0] + TPrescalerReg
Write_MFRC522(TReloadRegL, 30);
Write_MFRC522(TReloadRegH, 0);
Write_MFRC522(TxAutoReg, 0x40); //100%ASK
Write_MFRC522(ModeReg, 0x3D); //CRC initilizate value 0x6363 ???
//ClearBitMask(Status2Reg, 0x08); //MFCrypto1On=0
//Write_MFRC522(RxSelReg, 0x86); //RxWait = RxSelReg[5..0]
//Write_MFRC522(RFCfgReg, 0x7F); //RxGain = 48dB
AntennaOn(); //turn on antenna
}
/*
* Function:MFRC522_Request
* Description:Searching card, read card type
* Input parameter:reqMode--search methods,
* TagType--return card types
* 0x4400 = Mifare_UltraLight
* 0x0400 = Mifare_One(S50)
* 0x0200 = Mifare_One(S70)
* 0x0800 = Mifare_Pro(X)
* 0x4403 = Mifare_DESFire
* return:return MI_OK if successed
*/
uchar MFRC522_Request(uchar reqMode, uchar *TagType)
{
uchar status;
uint backBits; //the data bits that received
Write_MFRC522(BitFramingReg, 0x07); //TxLastBists = BitFramingReg[2..0] ???
TagType[0] = reqMode;
status = MFRC522_ToCard(PCD_TRANSCEIVE, TagType, 1, TagType, &backBits);
if ((status != MI_OK) || (backBits != 0x10))
{
status = MI_ERR;
}
return status;
}
/*
* Function:MFRC522_ToCard
* Description:communicate between RC522 and ISO14443
* Input parameter:command--MF522 command bits
* sendData--send data to card via rc522
* sendLen--send data length
* backData--the return data from card
* backLen--the length of return data
* return:return MI_OK if successed
*/
uchar MFRC522_ToCard(uchar command, uchar *sendData, uchar sendLen, uchar *backData, uint *backLen)
{
uchar status = MI_ERR;
uchar irqEn = 0x00;
uchar waitIRq = 0x00;
uchar lastBits;
uchar n;
uint i;
switch (command)
{
case PCD_AUTHENT: //verify card password
{
irqEn = 0x12;
waitIRq = 0x10;
break;
}
case PCD_TRANSCEIVE: //send data in the FIFO
{
irqEn = 0x77;
waitIRq = 0x30;
break;
}
default:
break;
}
Write_MFRC522(CommIEnReg, irqEn|0x80); //Allow interruption
ClearBitMask(CommIrqReg, 0x80); //Clear all the interrupt bits
SetBitMask(FIFOLevelReg, 0x80); //FlushBuffer=1, FIFO initilizate
Write_MFRC522(CommandReg, PCD_IDLE); //NO action;cancel current command ???
//write data into FIFO
for (i=0; i
Write_MFRC522(FIFODataReg, sendData[i]);
}
//procceed it
Write_MFRC522(CommandReg, command);
if (command == PCD_TRANSCEIVE)
{
SetBitMask(BitFramingReg, 0x80); //StartSend=1,transmission of data starts
}
//waite receive data is finished
i = 2000; //i should adjust according the clock, the maxium the waiting time should be 25 ms???
do
{
//CommIrqReg[7..0]
//Set1 TxIRq RxIRq IdleIRq HiAlerIRq LoAlertIRq ErrIRq TimerIRq
n = Read_MFRC522(CommIrqReg);
i--;
}
while ((i!=0) && !(n&0x01) && !(n&waitIRq));
ClearBitMask(BitFramingReg, 0x80); //StartSend=0
if (i != 0)
{
if(!(Read_MFRC522(ErrorReg) & 0x1B)) //BufferOvfl Collerr CRCErr ProtecolErr
{
status = MI_OK;
if (n & irqEn & 0x01)
{
status = MI_NOTAGERR; //??
}
if (command == PCD_TRANSCEIVE)
{
n = Read_MFRC522(FIFOLevelReg);
lastBits = Read_MFRC522(ControlReg) & 0x07;
if (lastBits)
{
*backLen = (n-1)*8 + lastBits;
}
else
{
*backLen = n*8;
}
if (n == 0)
{
n = 1;
}
if (n > MAX_LEN)
{
n = MAX_LEN;
}
//read the data from FIFO
for (i=0; i
backData[i] = Read_MFRC522(FIFODataReg);
}
}
}
else
{
status = MI_ERR;
}
}
//SetBitMask(ControlReg,0x80); //timer stops
//Write_MFRC522(CommandReg, PCD_IDLE);
return status;
}
/*
* Function:MFRC522_Anticoll
* Description:Prevent conflict, read the card serial number
* Input parameter:serNum--return the 4 bytes card serial number, the 5th byte is recheck byte
* return:return MI_OK if successed
*/
uchar MFRC522_Anticoll(uchar *serNum)
{
uchar status;
uchar i;
uchar serNumCheck=0;
uint unLen;
//ClearBitMask(Status2Reg, 0x08); //strSensclear
//ClearBitMask(CollReg,0x80); //ValuesAfterColl
Write_MFRC522(BitFramingReg, 0x00); //TxLastBists = BitFramingReg[2..0]
serNum[0] = PICC_ANTICOLL;
serNum[1] = 0x20;
status = MFRC522_ToCard(PCD_TRANSCEIVE, serNum, 2, serNum, &unLen);
if (status == MI_OK)
{
//Verify card serial number
for (i=0; i<4; i++)
{
serNumCheck ^= serNum[i];
}
if (serNumCheck != serNum[i])
{
status = MI_ERR;
}
}
//SetBitMask(CollReg, 0x80); //ValuesAfterColl=1
return status;
}
/*
* Function:CalulateCRC
* Description:Use MF522 to caculate CRC
* Input parameter:pIndata--the CRC data need to be read,len--data length,pOutData-- the caculated result of CRC
* return:Null
*/
void CalulateCRC(uchar *pIndata, uchar len, uchar *pOutData)
{
uchar i, n;
ClearBitMask(DivIrqReg, 0x04); //CRCIrq = 0
SetBitMask(FIFOLevelReg, 0x80); //Clear FIFO pointer
//Write_MFRC522(CommandReg, PCD_IDLE);
//Write data into FIFO
for (i=0; i
Write_MFRC522(FIFODataReg, *(pIndata+i));
}
Write_MFRC522(CommandReg, PCD_CALCCRC);
//waite CRC caculation to finish
i = 0xFF;
do
{
n = Read_MFRC522(DivIrqReg);
i--;
}
while ((i!=0) && !(n&0x04)); //CRCIrq = 1
//read CRC caculation result
pOutData[0] = Read_MFRC522(CRCResultRegL);
pOutData[1] = Read_MFRC522(CRCResultRegM);
}
/*
* Function:MFRC522_Write
* Description:write block data
* Input parameters:blockAddr--block address;writeData--Write 16 bytes data into block
* return:return MI_OK if successed
*/
uchar MFRC522_Write(uchar blockAddr, uchar *writeData)
{
uchar status;
uint recvBits;
uchar i;
uchar buff[18];
buff[0] = PICC_WRITE;
buff[1] = blockAddr;
CalulateCRC(buff, 2, &buff[2]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buff, 4, buff, &recvBits);
if ((status != MI_OK) || (recvBits != 4) || ((buff[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
if (status == MI_OK)
{
for (i=0; i<16; i++) //Write 16 bytes data into FIFO
{
buff[i] = *(writeData+i);
}
CalulateCRC(buff, 16, &buff[16]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buff, 18, buff, &recvBits);
if ((status != MI_OK) || (recvBits != 4) || ((buff[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
}
return status;
}
/*
* Function:MFRC522_Halt
* Description:Command the cards into sleep mode
* Input parameters:null
* return:null
*/
void MFRC522_Halt(void)
{
uchar status;
uint unLen;
uchar buff[4];
buff[0] = PICC_HALT;
buff[1] = 0;
CalulateCRC(buff, 2, &buff[2]);
status = MFRC522_ToCard(PCD_TRANSCEIVE, buff, 4, buff,&unLen);
}
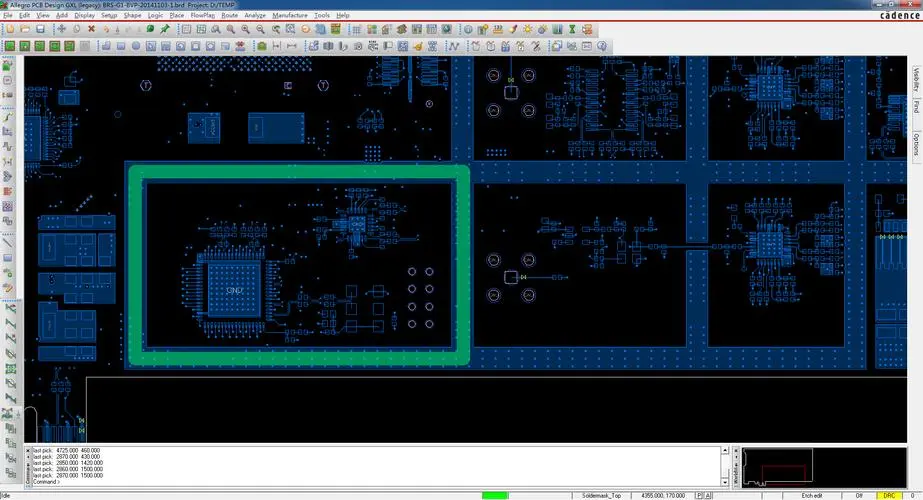
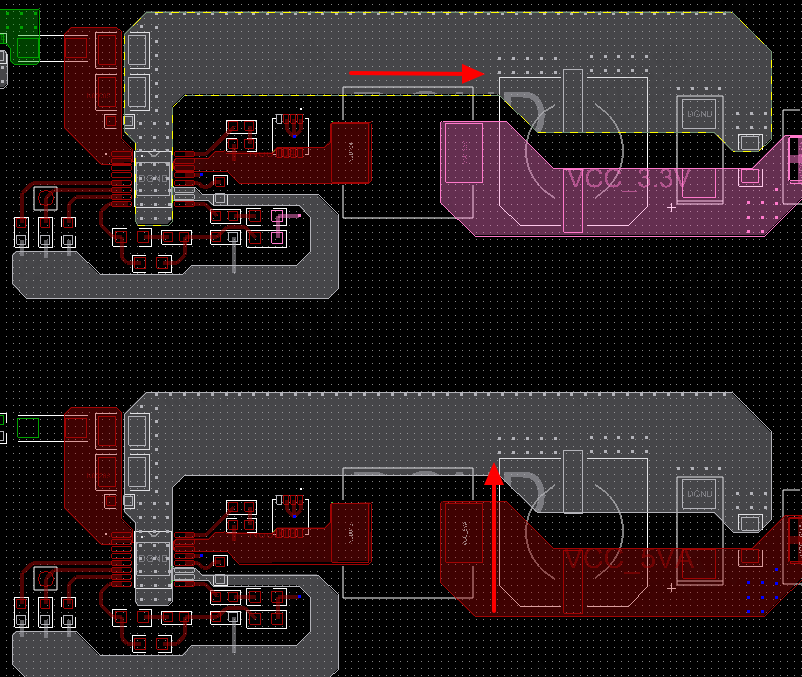
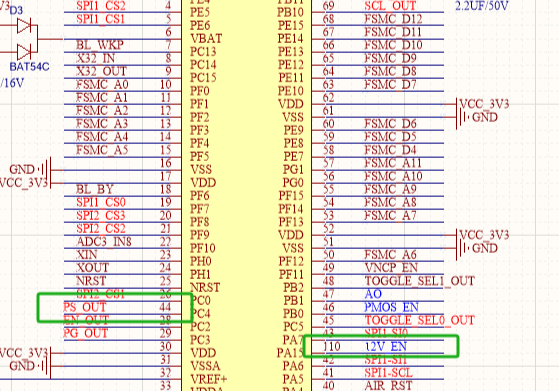
RFID+键盘的电子锁

提问于
2024-11-29 02:01