 扫码关注
扫码关注























文章
盘点主流智能汽车电子架构
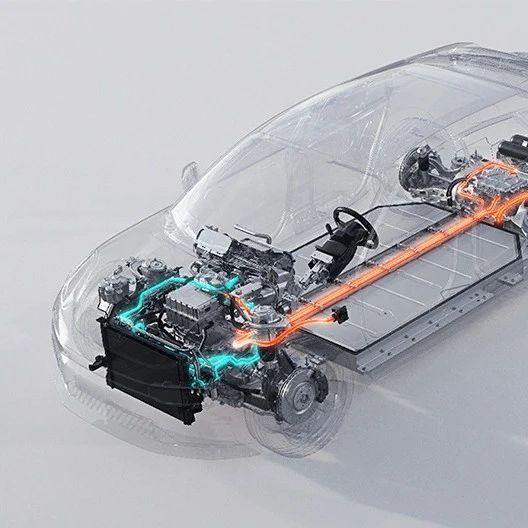
本文对几家主流智能汽车的架构设计概念进行了技术分析,并对几种智能汽车的架构设计概念进行了评价。1. 智能汽车电子架构研究现状传统分布式汽车电子电气架构的设计 思想为硬件定义规格,硬件架构采用CAN总线网络和分布式功能单元,单功能单控制器,软硬件不能解耦,专用传感,专用控制器,专用算法。传统汽车电子电
1721 0 0

专注于汽车电子领域的信息交融平台,涵盖汽车电子行业资讯、市场动态、技术干货、知识见解、行业趋势等资讯深度覆盖。
本文对几家主流智能汽车的架构设计概念进行了技术分析,并对几种智能汽车的架构设计概念进行了评价。1. 智能汽车电子架构研究现状传统分布式汽车电子电气架构的设计 思想为硬件定义规格,硬件架构采用CAN总线网络和分布式功能单元,单功能单控制器,软硬件不能解耦,专用传感,专用控制器,专用算法。传统汽车电子电

来源:智能汽车开发者平台一、什么是OTA OTA(Over-the-Air Technology)中文翻译就是空中下载技术,即通过移动通信网络的空中接口对远程 设备进行数据及应用进行远程管理的技术。 OTA 大体上可分为两类: FOTA(Firmware-over-the-air,固件在线升级):指

本篇我们开始介绍相关的性能测试如何开展,区别与传统互联网产品的性能测试,ECU的软件性能测试有很大的不同,我们也会在文中给大家介绍两者之间的区别。1、ECU软件和通用软件性能测试的区别通用软件进行性能测试时通常会通过压力测试、负载测试、稳定性测试、疲劳强度测试、用户并发访问测试等等方法来了解当前软件
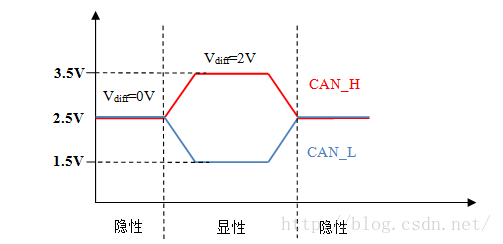
1. 简介CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。另外不同于传统的网络(比如USB或者以太网),CAN节点与节点之间不会传输大数据块,一帧CAN消息最多传输8字节用户数据,采用短数据包也可以使得系统获得更好的稳定性
AUTOSAR架构的软件开发工具有哪些?RTE(Run Time Environment)生成器:用于生成基于AUTOSAR标准的软件体系结构的RTE,包括PDU Router、IPDU、I-Signal等模块,该工具的使用可以极大地简化软
电动机械式助力转向系统(EPS)没有了液压助力系统的液压泵、液压管路、转向管柱阀体等结构,结构非常简单,通过减速器以纯机械方式将电机产生的助力传递到转向系统上。EPS 电动助力转向系统是机电一体化的产品,它由转向管柱、扭矩传感器、伺服电机、

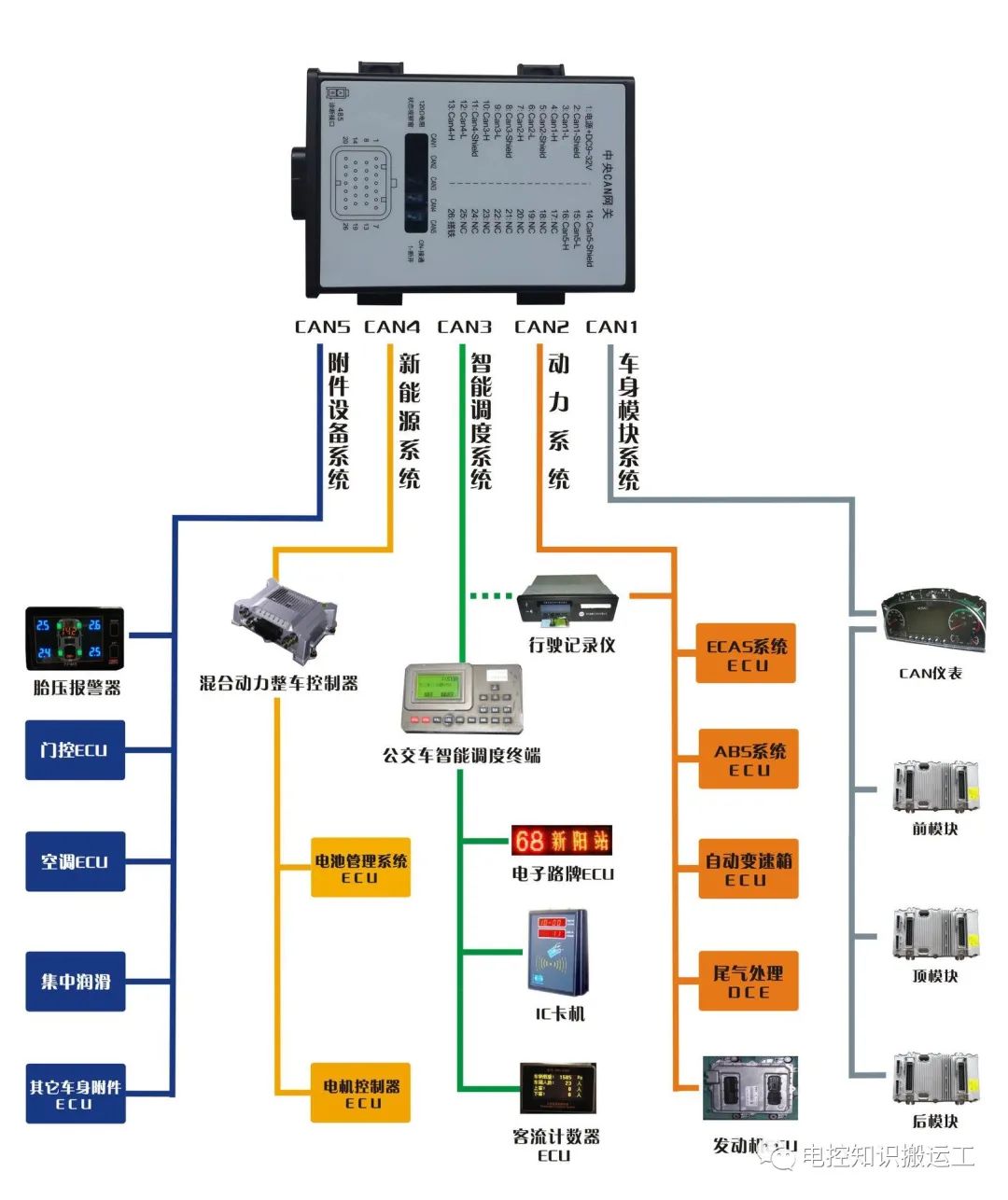
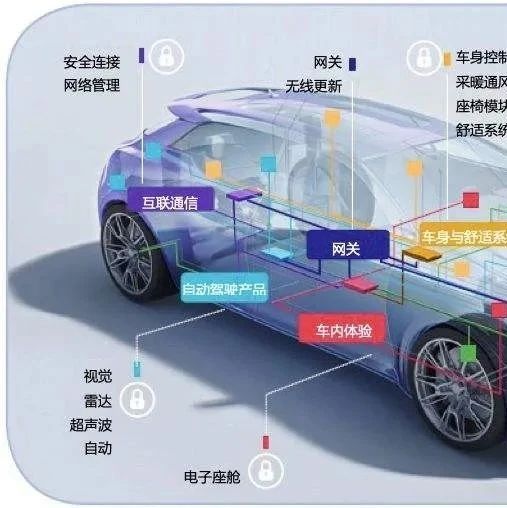
汽车网关(Automotive Gateway)汽车网关控制器是车内各种电、光总线之间的路由器。网关的主要作用是在网络和ECU之间提供安全的无缝通信,包括在车辆的许多内部网络和外界的外部网络之间架起一座桥梁。汽车网关(Automotive Gateway) 可以简单形象地理解为翻译官,作为整车网络的
1、什么是busoff?BUSOFF,从字面意思可以看出,表示总线的关闭,此时ECU从总线脱离,既不能接收总线的报文,也不能向总线发送报文。 2、BUSOFF是如何产生的?CAN总线上存在多种错误状态,包括:位错误(Bit Check Error)、位填充错误(Bit Stuff Error)、C
三极管,全称应为半导体三极管,也称双极型晶体管、晶体三极管,是一种控制电流的半导体器件,其作用是把微弱信号放大成幅度值较大的电信号, 也用作无触点开关。晶体三极管,是半导体基本元器件之一,具有电流放大作用,是电子电路的核心元件。三极管是在一块半导体基片上制作两个相距很近的PN结,两个PN结把整块半导











版权所有© 2022 湖南凡亿智邦电子科技有限公司湘ICP备18024493号-1








