扫码关注
扫码关注
























- 全部
- 默认排序
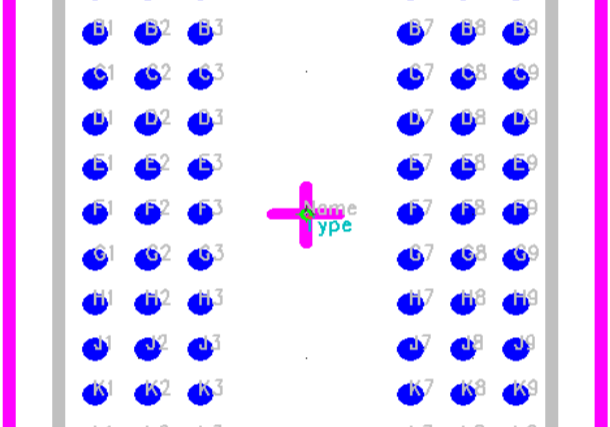
PADS铜箔绘制
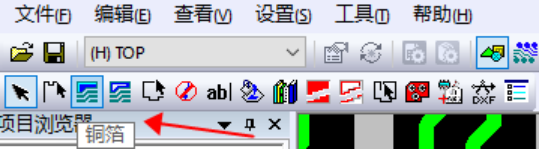
铜箔即静态类铜皮,实心铜皮,此类型铜皮在PCB上绘制后,其形状不会随障碍物变化,不会因DRC情况进行避让,绘制的形状与实际生产出的形状尺寸大小一致。1)进入“绘图工具栏”,点击“铜箔”按钮,进入铜箔绘制模式。如图5-125所示。图 5-12
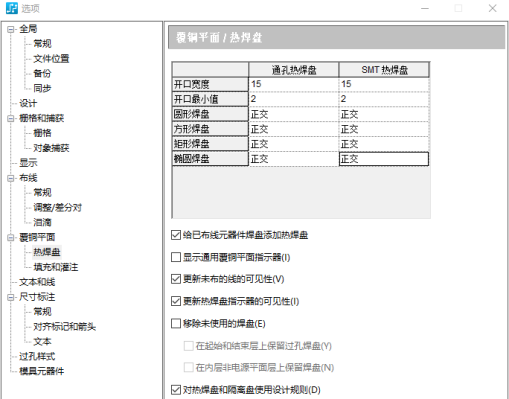
PADS覆铜平面
覆铜平面是动态铜皮类型,即绘制好铜皮后,碰到障碍物,覆铜后期形状会规避障碍物,以免DRC生成。1)覆铜平面添加步骤与铜箔操作基本类似,首先执行菜单命令中“工具-选项”或者使用组合快捷键“Enter+Ctrl”,设置“热焊盘”选项,如图5-1
消防机器人是特种机器人的一种,是可代替消防员从事特定消防作业的机器人,在灭火和抢险救援中愈加发挥举足轻重的作用。那么,消防机器人有哪些类型?消防机器人能代替消防员做些什么呢?1.消防破拆机器人消防破拆机器人可替代人在有毒(污染)、有倒塌、强

随着越来越多的设备连接到互联网,这些系统受到网络攻击的风险已经成为一个真正的问题。本文将介绍一些保护IoT系统的最佳实践,从监控和记录活动到在设备中从头开始构建安全性。网络攻击正变得越来越普遍和危险。物联网设备特别容易受到多种类型的网络攻击

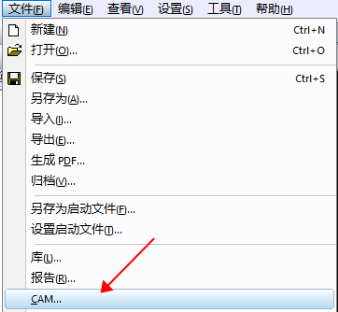
执行“文件-CAM”功能,在弹出的“定义CAM文档”页面点击“添加”按钮,在弹出的“添加文档”页面下“文档名称”栏输入名称,一般与电气层名相同,如“TOP”,在“文档类型”栏选择“布线/分割平面”类型,在“输出文件”栏修改名称,在“制造层”
CAN通信是通过以下5种类型的帧进行的:数据帧 遥控帧 错误帧 过载帧 帧间隔另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。各种帧的用途如下表所示:近期打算写5篇文章,分别详细介绍这5种类
触觉传感器是根据其触摸的生物感觉设计的,可以检测机械刺激.刺激温度和疼痛。触觉传感器将接收并响应力或物理接触的信号。它们是机器人技术中常用的传感器之一,包括压电.压阻.电容和弹性类型。工业机器人触觉传感器可以帮助工业机器人测量与其环境的任何

我们都知道电阻的应用范围很广,所以根据不同的应用领域和要求,电阻被分为许多不同的类型。电阻器可以分为插件电阻和贴片电阻,当然这是根据外观来区分的,因为两者有着本质的区别,因而插件电阻和贴片电阻还是很好区分的。下面我们一起看看吧!贴片电阻和插

直线感应电机是一种没有从旋转运动到直线运动的变换装置,能将电能直接转换成直线机械能的电力传动装置。 一、直线感应电机分类及结构直线感应电机主要有扁平型、圆筒型和圈盘型3种类型,其中扁平型应用最为广泛。1.扁平型直线感应电机可以看作是由旋转式感应电机演变而来的。设想把旋转感应电机沿径向剖开,并将圆周展

点击“绘图工具栏”图标,在“Decal Wizard”界面选择BGA/PGA选项,参数设置可参考图页内值设置,如图5-202所示。图5-202 BGA封装“Decal Wizard”设置2)设置完成点击“确定”按钮会自动生成BGA封装,如图