扫码关注
扫码关注
























- 全部
- 默认排序
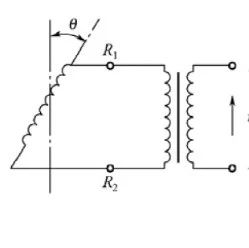
线路驱动器是一种电子设备,用于驱动电路中的负载,如电机、灯泡等。它能够将输入信号转换为适合负载工作的电流或电压信号,并保证负载能够正常工作。01线路驱动器组成线路驱动器通常由输入电路、输出电路和功率放大电路组成。1、输入电路:接收外部信号,

线路驱动器是一种电子设备,用于驱动电路中的负载,如电机、灯泡等。它能够将输入信号转换为适合负载工作的电流或电压信号,并保证负载能够正常工作。01线路驱动器组成线路驱动器通常由输入电路、输出电路和功率放大电路组成。1、输入电路:接收外部信号,

异型联轴器是一种用于传递旋转动力的机械装置,其主要作用是将两个非同心轴连接在一起,使得两个轴能够同时旋转,同时允许轴之间有一定的偏差和角度。异型联轴器主要由两个轴承和中间的弹性元件组成。01异型联轴器组成1、轴承:异型联轴器一般由两个轴承组

这些1200 V碳化硅(SiC)MOSFET系列针对高功率应用进行了优化,如UPS、电机控制和驱动、开关模式电源、太阳能和储能系统、电动汽车充电、高压DC/DC转换器等。该系列基于第三代技术,多种多样的导通电阻和封装选项使设计人员能够根据应
在工业控制中,有刷电机和无刷电机是最常见的电动机,它们在结构、工作原理及性能上存在显著差异,但很多小白不太清楚这两者的区别,所以本文将简短列出这两种电机的基本原理及区别。1、有刷电机的工作原理基本结构:由定子、转子、电刷和换向器组成。工作原
本篇我们学习一些常用的电动机的位置、速度检测方法,有的通过电磁感应效应检测、有的通过光电转换后检测、有的通过霍尔元器件检测,等等。下面我们就一一来讲解。1)光电编码器光电编码器可以把角度或者速度转换为数字信号输出,可以分为绝对式编码器、增量式编码器。我们先讲绝对式编码器,它由光电码盘和光电检测装置组
伺服舵机驱动基础
本篇文章我们来讲讲伺服舵机。1)舵机的用途伺服舵机一般也简称为舵机,是一种可以精确控制位置的电机系统,它可以通过控制指令输出指定的旋转角度。与普通直流电机的区别主要在:直流电机是一圈圈转动的,舵机只能在一定角度内转动,到达指定的位置后就停止;舵机一般有最大旋转角度,不能360°旋转。普通直流电机一般

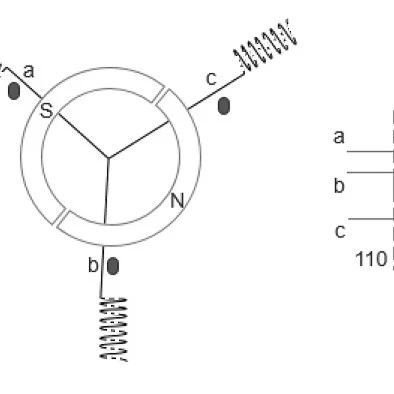
无刷电机是指无电刷和机械换向器的电机。我们知道,一般的有刷电机的定子是永磁体,转子是电磁铁。转子转动时,通过电刷来自动切换转子电磁铁的中的电流方向,使得转子始终受到转动力矩的作用,得以旋转起来。而无刷电机,转子是永磁体,定子是电磁铁,使用电子换向器器来切换电磁铁中的电流方法。由于它没有机械式的电刷,
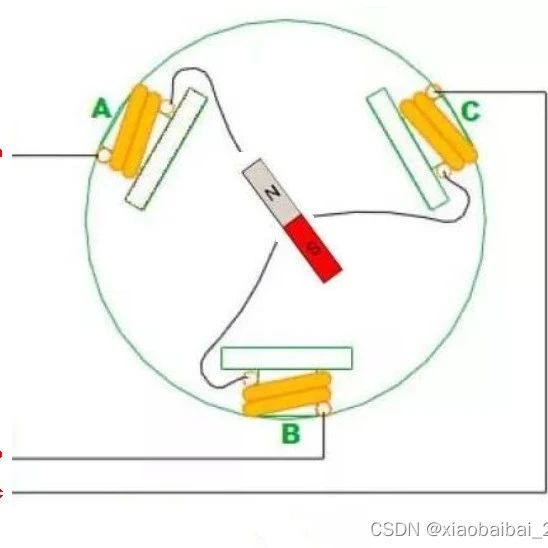
上一篇文章我们讲了一些无刷电机的基础知识,包括无刷电机的内部结构,驱动原理等,我们知道了只需要按照转子的当前位置,来按顺序给定子线圈通电,就能让电机转动起来。但是,上一篇中我们跳过了一个关键步骤,就是如何检测转子的位置。本篇我们就讲讲常用的位置检测方法,以及引出的一些相关问题。1)霍尔传感器检测位置
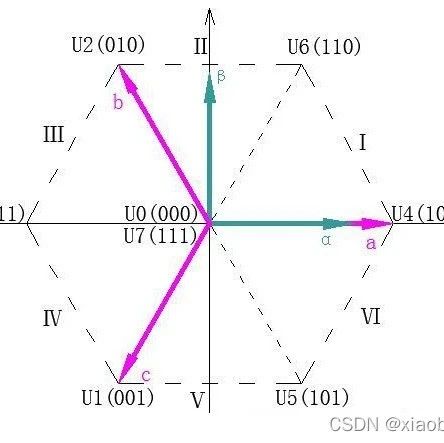
本节我们讲一些无刷电机FOC矢量控制的入门知识。1)FOC矢量控制的作用我们前两节讲的无刷电机(BLDC),是最简单的一种结构,当转子匀速转动时,定子内产生的反电动势是梯形波;在驱动无刷电机转动时,线圈中只有加电和不加电两种状态,所以转矩是脉冲式的,转动的过程不平稳,会有顿挫感。虽然增加电机的极对数