扫码关注
扫码关注























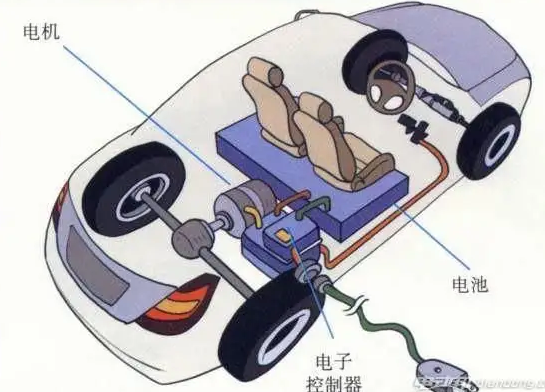
雷达,被称为电动汽车自动驾驶的“眼睛”。目前主流的“眼睛”有四类,分别是毫米波雷达、激光雷达、超声波雷达、摄像头,它们有着不同的功能以及运用不同的工作原理。
本文主要介绍毫米波雷达、激光雷达、超声波雷达这三种技术都应用在哪些场景,又怎么进行区分。
1、毫米波雷达
毫米波实际上就是电磁波,波段使用范围为30-300GHz频域,波长为1-10mm,介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。
测距原理是把无线电波(雷达波/电磁波)发射出去,根据接收回波与发送之间的时间差测得目标位置距离数据。一般的探测距离在0-200米之间,穿透能力强,具有全天候全天时的特点,但在雨、雾和湿雪等高潮湿环境下,会降低探测距离。
此外, 相对来说,毫米波雷达元器件成本高,加工精度相对要求高,单片收发集成电路的开发相对迟缓,需要与摄像头互补使用。
2、激光雷达
激光雷达也称光学雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。
其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,显示器就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
由于光速是我们目前已知的最快速度,因此激光雷达也是所有雷达中传播速度最快的。但是激光雷达目前存在挑战:一是车规级产品难度高,二是成本高,三是寿命短。
3、超声波雷达
超声波雷达是通过超声波发射装置向外发出超声波,再利用接收器接收反射回来的超声波时间差来测算距离。一般来说,频率越高灵敏度越高,而水平与垂直方向的探测角度就越小,使用范围为40KHz/48KHz/58KHz。
在很多车前后保险杠上看到的圆形装置,就是超声波雷达,它的特点就是传播距离远,但传播速度慢,所以车辆运动较慢或者静止时,它能派上用场,一旦车速过高,它的作用就不大了。于是,在车辆高速运动时更适用反应更快的毫米波雷达。
其探测距离在0.1-3米之间时精度较高,目前有部分测量侧方障碍物的超声波雷达其测距达到了7米,超声波雷达现在主要应用在倒车雷达、自动泊车等功能上。
此文内容来自OFweek新能源汽车网,如涉及作品内容、版权和其它问题,请于联系工作人员,我们将在第一时间和您对接删除处理!
了解自动驾驶汽车的“眼睛”,探索雷达的奥妙之处

2022-06-15 17:47
1136
0
评论 0 收藏
侵权举报
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表凡亿课堂立场。文章及其配图仅供工程师学习之用,如有内容图片侵权或者其他问题,请联系本站作侵删。
您需要登录后才可以评论登录
热门评论0
相关文章