扫码关注
扫码关注

























本节我们介绍I2C总线,并使用stm32的I2C总线来访问加速度传感器ADXL345。
I2C总线通信比较适合设备内部各芯片间的通信,它只需要两根信号线。
I2C可以挂载多个主机和从机,通信总是由主机发起。每个从机都有唯一的地址,主机通过地址决定访问哪个从机。
I2C总线的两根线,SCL为时钟线,SDA为数据线;所有的器件对这两根线的输出操作只能拉低,当释放总线时,由总线上的上拉电阻将电平拉高。所以硬件连接上,上拉电阻是必须的,否则不能通信。
I2C空闲时,所有器件释放总线,SCL和SDA都被上拉电阻拉到高电平;
I2C的起始条件:SCL为高电平时,SDA由高电平向低电平切换;表示开始传送数据;一般是需要通信的主机发起,起始条件的图示如下:
I2C的停止条件:SCL为高电平时,SDA由低电平向高电平跳变;表示结束传送数据;一般也是主机最后结束通信,停止条件的图示如下:
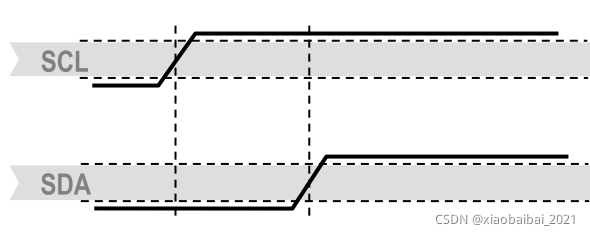
传输数据时,在SCL时钟线为高电平时,SDA数据线上的电平不允许被修改;SCL时钟线为低电平时,SDA数据线上的电平可变为高/低,如下图所示:
I2C的ACK和NACK,都是回应,ACK是将SDA线拉低,NACK是将SDA总线释放(拉高);ACK和NACK都是回应,可以是主机回应从机、也可以是从机回应主机。具体来说(以ADXL345芯片为例):
主机发起通信后,如果要向从机写入数据,则每传输一个字节都需要等待从机回应ACK,如下图所示;具体到实际的操作,就是主机每发完一个字节的数据,会释放总线,等待从机回应ACK(即等待从机把SDA线拉低)。最后通信完成后,主机发送停止条件:

主机发起通信后,如果要从从机处读取数据,则发送地址时,需要等待从机回应ACK;在从机向主机回复数据时,主机要回应ACK,当主机读完最后一个字节不再读取时,就回应NACK;写入数据的过程如下图:

上面的例子是以加速度传感器ADXL345芯片为例,其他芯片在使用I2C通信时,可能有细微的不同,但基本上都是这几种状态组合起来的。
Stm32带了硬件I2C,下面我们就使用stm32的硬件i2c读取加速度传感器ADXL345的数值。
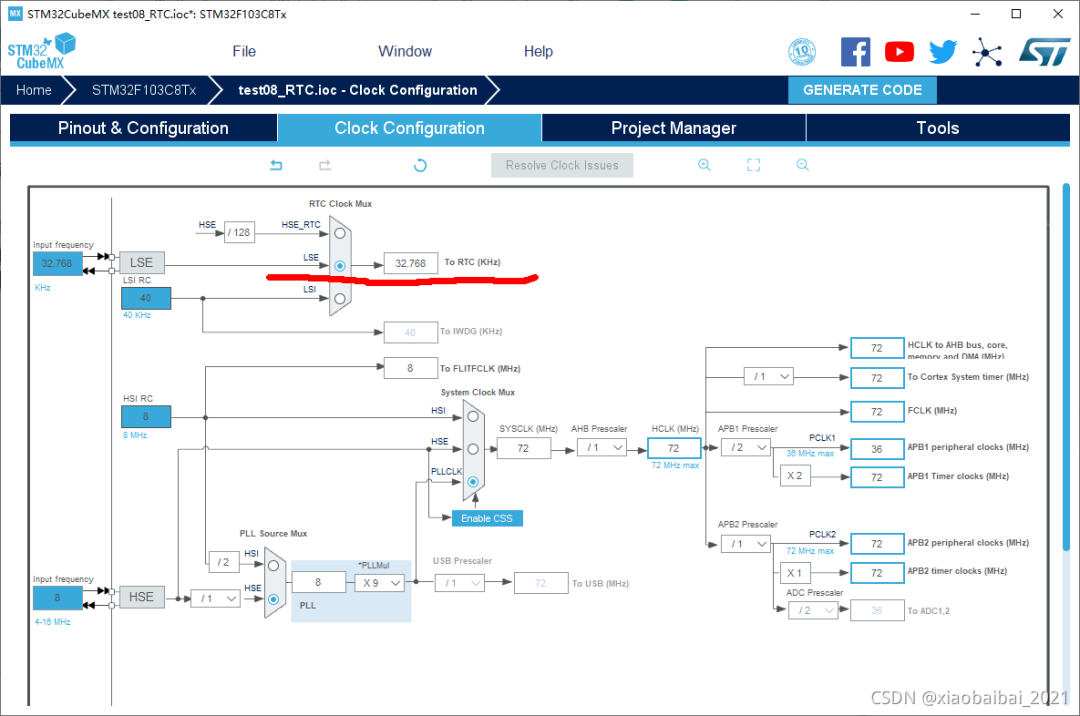
我们仍然以串口的工程为基础,在它上面添加设置,如下图,选择I2C1接口,其他都默认:
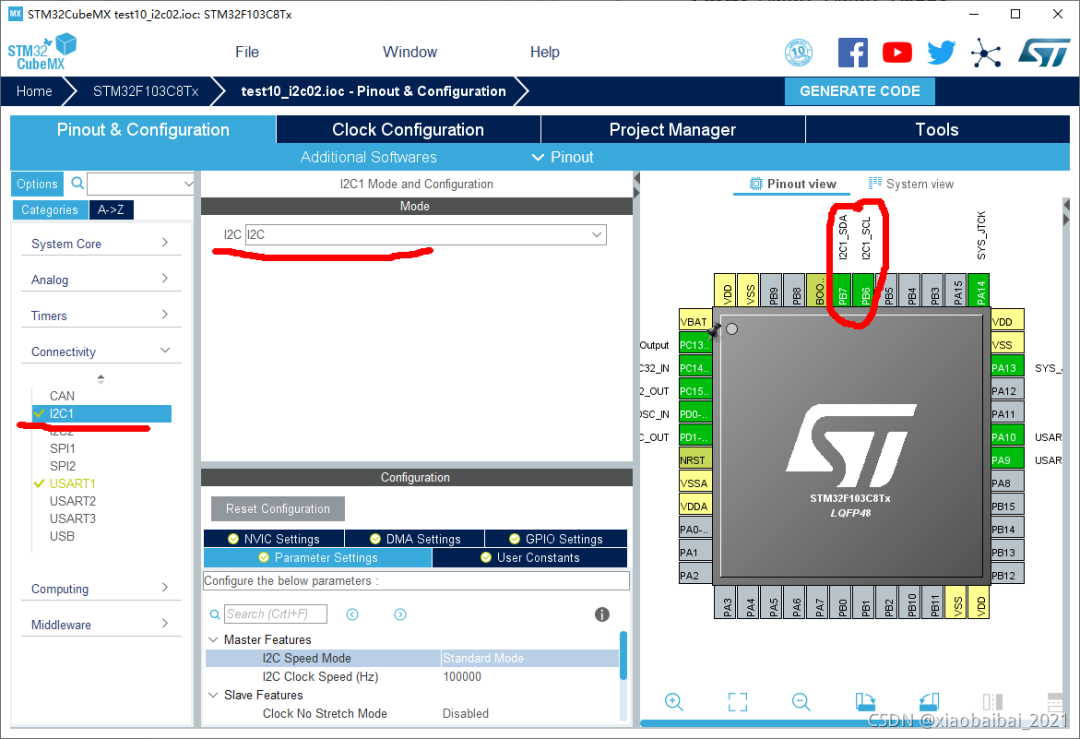
选择之后可以发现引脚PB6和PB7被占用为I2C的引脚,其中PB6是SCL、PB7是SDA。
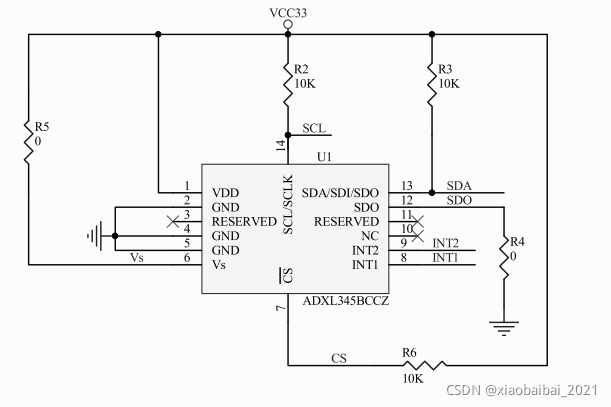
在硬件连接上,我们也需要将ADXL345芯片的SCL和SDA连接到PB6和PB7,并且SDA和SCL都要用电阻上拉到电源,ADXL345芯片的相关原理图如下:
在cubemx中生成工程代码,在keil中打开。Stm32的hal库已经将i2c的初始化、i2c的读写操作封装成了函数,我们直接调用即可。
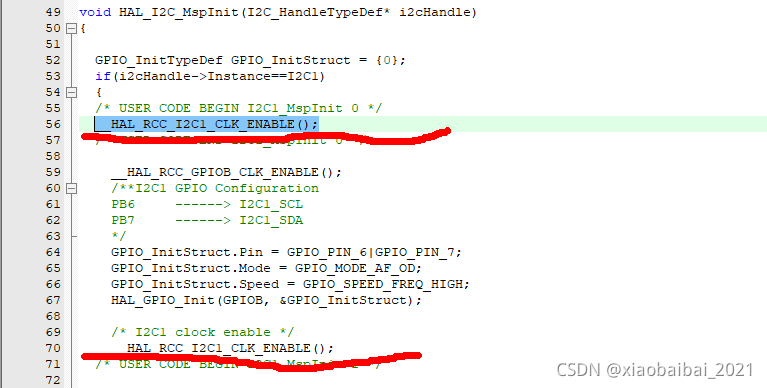
这里先需要修改一个bug,如下图:
__HAL_RCC_I2C1_CLK_ENABLE(); 这一句使能i2c时钟的语句,cubemx生成的代码在GPIO初始化之后,这样不能设置成功,需要把它提前到GPIO初始化之前:
在Main函数中添加初始化ADXL345的代码:
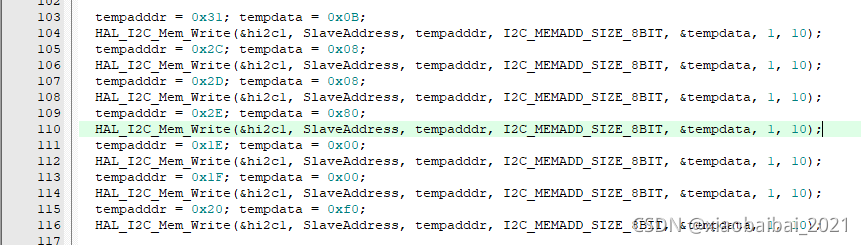
简单说明一下,前面写入的4个值是设置芯片的工作模式,最后写入的三个值是x、y、z三个方向的校准参数。由于ADXL345传感器有初始误差(网上有说法是X、Y方向误差不大,Z轴可能误差达到几个g;我的这个芯片X、Y、轴基本正常,Z轴有大约0.6g左右的误差),可以写入一组测好的参数,让它输出时自动减掉这个值,达到去除初始误差的目的,我这里在Z轴写入了f0,校准后基本正常。
主循环内添加循环读取ADXL345数值的代码:
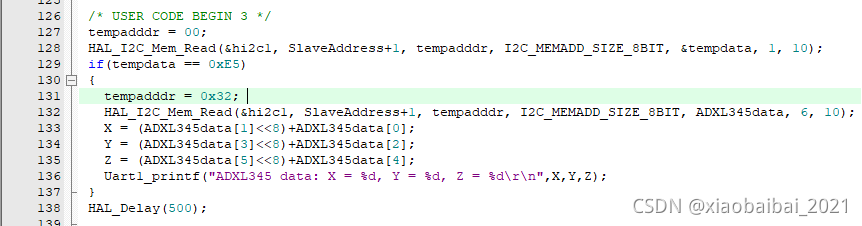
编译下载运行,可以看到数据输出:
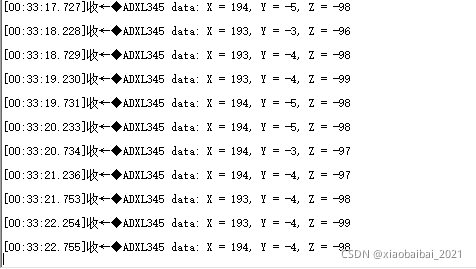
变换传感器方向,可以看到测出的重力加速度的数值变化。
在使用stm32的硬件i2c时,查了很多资料,挺多网友说stm32的硬件i2c有问题,我用的不多,但是汇总了一些网上的讨论,以作为备忘,万一哪天必须用硬件i2c时也好排查:
a) cubemx生成的代码,初始化i2c的时钟要提到GPIO初始化之前;
b) I2c的速率不能过高,有说法是50k以下基本无问题,100k以上运行时间久了会出问题;
c) 某些带FSMC模块的stm32型号,由于FSMC和I2C1模块共用了PB7引脚,会使得I2C1不能正常启动;即使没有使用FSMC只是打开了FSMC的时钟也会影响,解决办法是改用I2C2或者重定义I2C的时钟线和数据线到PB8、9引脚;或者关掉FSMC的时钟;
d)硬件i2c不能被中断打断,否则会出问题;如果使用中断,建议i2c的中断设置为最高优先级。
鉴于有些问题确实不好验证,本人后面开发都使用软件i2c了,效率低一些但可靠性高,并且移植到其他芯片上也比硬件i2c方便很多。








![电子设计:sc15_理想低通采样定理[学以致用系列课程之数字信号处理]](https://api.fanyedu.com/uploads/image/54/5dbb192e9e590148ca16939881b59d.png)