扫码关注
扫码关注
























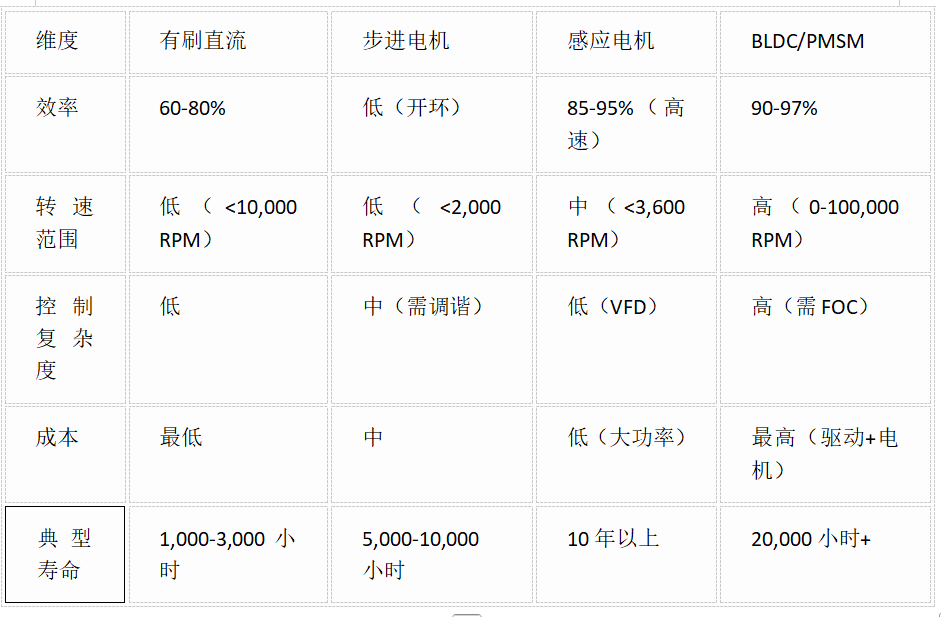
步进电机与伺服电机是现代自动化系统中的两种常见驱动方式,它们在许多应用中发挥着关键作用。尽管两者都设计用于精确控制运动,但它们在过载能力方面表现出截然不同的特性。本文将详细探讨步进电机缺乏过载能力的原因,并重点分析伺服电机的过载能力及其实现机制。

步进电机的过载限制
步进电机以其简单的控制逻辑和相对较低的成本而受到广泛应用。然而,步进电机的一个显著缺点是它们缺乏过载能力。这主要是因为步进电机的设计是基于离散步进的,其控制通常是通过改变电流的方向和相位来实现的。一旦超过其额定负载,步进电机可能会失去同步,导致步进错误或完全停止工作。此外,步进电机的转矩与电流成正比,当电流超过其额定值时,电机可能会过热,从而损坏。
伺服电机的过载能力
与步进电机不同,伺服电机具有出色的过载能力。伺服电机通过闭环控制系统实现精确的位置、速度和转矩控制。其过载能力主要源于以下几个方面的设计:
转矩控制:伺服电机通常采用转矩控制模式,即使在过载情况下,也能通过调整电流来保持恒定的转矩输出。这种控制策略允许电机在短时间内承受超过额定转矩的负载,而不会失去同步。
热管理:伺服电机通常配备有先进的热管理系统,包括散热片和风扇等,以确保在过载情况下电机内部的温度不会过高。此外,电机材料的选择也考虑了高温性能,以承受过载时产生的额外热量。
动态响应:伺服电机具有快速的动态响应能力,可以在短时间内快速调整转矩和速度以适应负载变化。这种特性使得伺服电机在面对突然增加的负载时能够迅速作出反应,保持系统的稳定运行。
本文凡亿教育原创文章,转载请注明来源!