扫码关注
扫码关注
























- 全部
- 默认排序
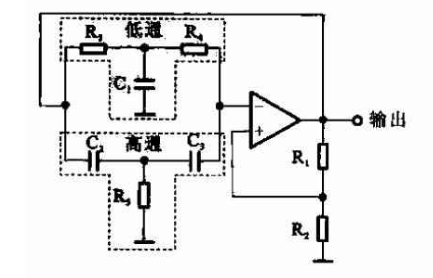
滤波器是一种电子器件,用于对电信号进行频率的选择性衰减或增强,以实现信号的分离、去噪、调整频谱特性等目的。滤波器是在电子领域中广泛应用的装置,可以根据不同的需求设计出不同类型的滤波器。基本概念包括以下几点:频率响应:滤波器的频率响应描述了滤
在PCB设计中,布局布线和电路性能息息相关,不正确的走线设计,尤其是信号线长度与信号频率之间不匹配,容易引发谐振干扰,进而影响电路的稳定性和可靠性,那么这是为什么?1、布线长度与信号波长的关系当信号线的长度恰好为信号波长的1/4或其整数倍时
正交混频器是一种常用的电路元件,用于将两个信号进行混频,同时保持信号的正交性(相位差为90度)。正交混频器通常用于无线通信系统中,在频率合成、解调、调制等方面都有重要应用。工作原理: 正交混频器的工作原理基于使用两路正交的本振信号(I/Q信
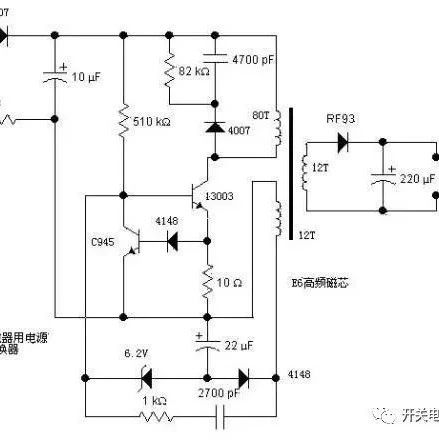
手机充电器原理
随着社会发展和效率化要求越来越高,手机的使用频率也就越来越高,所以手机充电器的使用频率也是逐渐上升的,但是手机充电器用久了之后,总是会出现很多问题,比如充不进去电或者是充电时间过长,那么今天就为大家介绍一下手机充电器常见故障检修以及对手机充电器原理图做一下讲解。下图为简单的一款自激线路
在电子工程设计中,电阻器是使用频率极高的基础元件,直接决定着电路性能与稳定性,其中之一是固定电阻器,工程师如何选购它?1. 电路类型与频率高频电路:选用碳膜电阻器、金属电阻器或金属氧化膜电阻器,因其分布电感和分布电容小。低频电路:考虑使用普
在电子工程设计中,电阻器是使用频率极高的基础元件,直接决定着电路性能与稳定性,其中之一是压敏电阻器,工程师如何选购它?1. 标称电压的准确性标称电压必须精确匹配应用电路的过电压阈值,过高则无法有效保护,过低则易导致误动作或击穿。2. 最大连

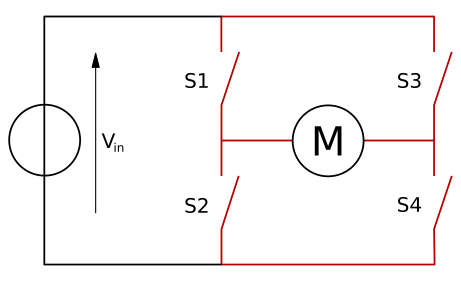
01本文要点了解基本的逆变器输入和输出方案逆变器的种类及其制造方法消费类电源逆变器的用途和其他应用功率逆变器是将DC转换成交流电的有用装置。逆变器是将直流电(DC)转换成交流电(AC)的装置。他们从DC源获取能量并将其转化为电能;它们不产生任何额外的能量,因此不是发电机。输入和输出电压和频率因每个逆
许多工程师面对电路的接地选择都会很烦恼,毕竟不同接地将直接影响电路的性能、稳定性和信号质量。按照电路的频率特性和复杂度,接地可分为单点接地、多点接地及混合接地,如何选?1、简单电路与低频电路(f<1MHz)单点接地:推荐采用并联单点接地方式

晶振的构造及工作原理
咱搞硬件的,应该都使用过晶振,上次写开关电源环路的零极点的时候,忽然想到晶振是自己起振的,如果从环路的角度看,应该就是利用的环路不稳定的特性,产生自激振荡。 除此之外,我又想到下面这些问题: 那么我们使用晶体的时候,电路的环路的传递函数是怎么样的呢 为什么只有晶振的固有频率

振荡器电路是电子工程领域中用于产生重复电子讯号的关键组件,它们能够将直流电能转换为具有特定频率的交流电能。按照类型,振荡器电路可分为电容三点式振荡器、双T振荡器以及相移振荡器。1、电容三点式振荡器电路组成:由串联电容与电感回路及正反馈放大器