 扫码关注
扫码关注























- 全部
- 默认排序
我的猜想二:你是想要PC端和MCU端就是USB的通讯如果是猜想一的话,则我们直接使用TTL转USB或者232转USB的方式,如果你的MCU有232接口的话
在嵌入式系统设计中,晶振作为系统的心脏,其频率的选择直接关系到系统时钟的准确性和稳定性,进而影响外设如串口通信的性能。特别是在高精度高频率场景,因此本文将谈谈晶振频率的选择问题。1、晶振频率选择的直接影响①波特率精准度不同的晶振频率在计算得
RS2321:-12V0: 3V接口的信号电平值较高,易损坏接口电路的芯片波特率为20Kbps传输速率较低最大通信距离50米抗噪声干扰性弱一根信号线和一根信号返回线而构成共地的传输形式一对一通信全双工TX,RX,GND三根线硬件设计RS422(发送端)1: 2V<压差< 6v="">0:-6V<压差

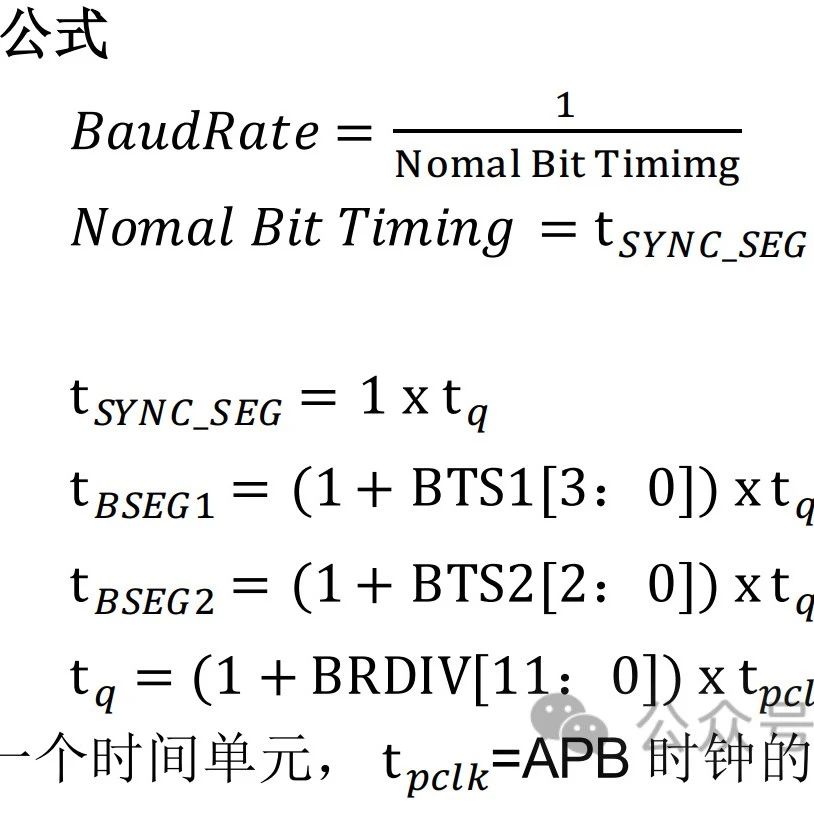
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
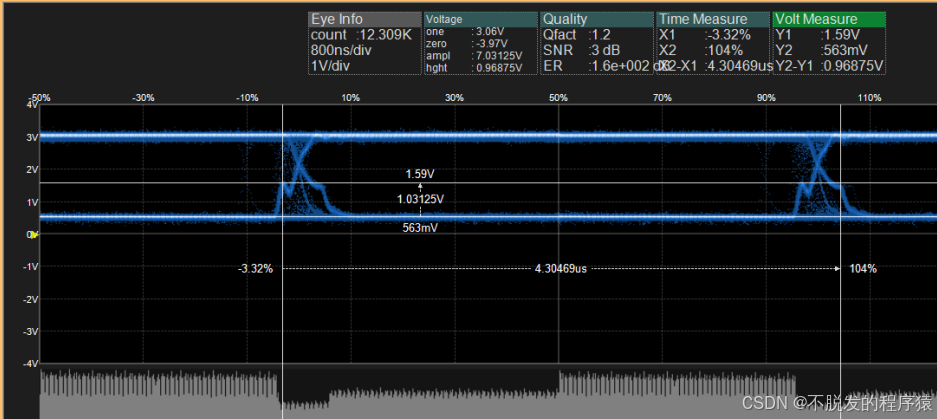
如何用示波器测量串口
如何确定时基假如要测量的波特率为9600, 则每一比特位的时间为:1/9600 ≈ 104 μs,一般示波器横向上每个大格子里5个小格子,要想看清一比特位一般需要一个小格子就够了,则时基为:104 μs * 5 = 520 μs, 也就是说时基要500 μs。注意:测量时选择的耦合方式为直流,边沿类
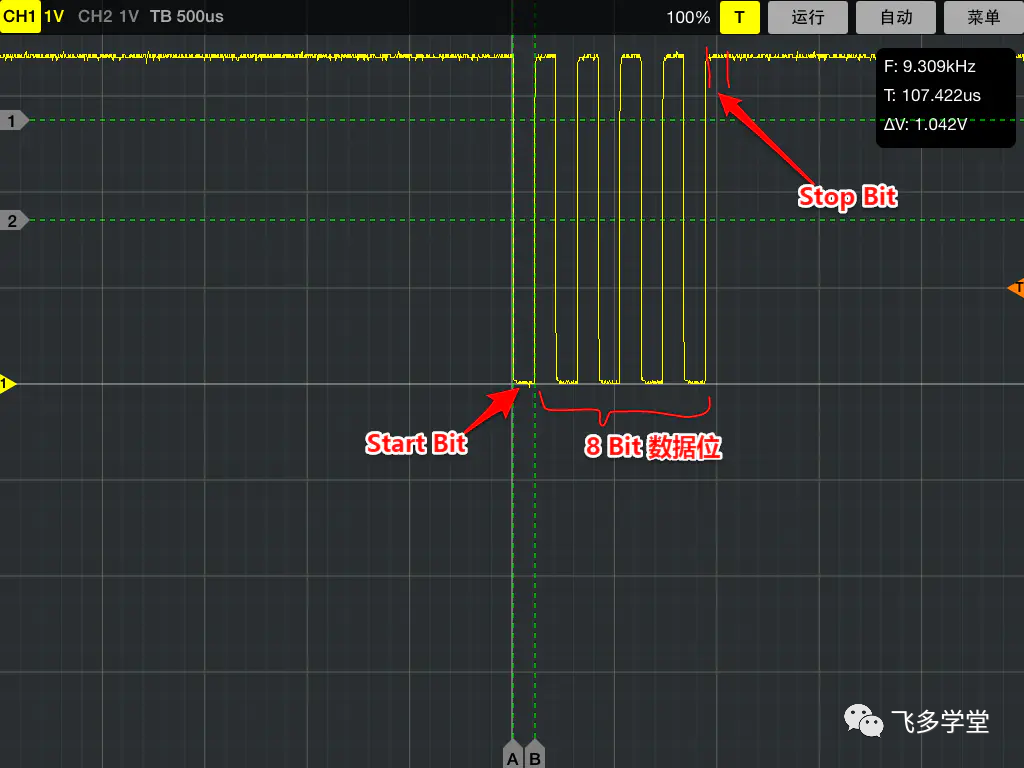
UART是一种异步全双工串行通信协议,由 Tx 和 Rx 两根数据线组成,因为没有参考时钟信号,所以通信的双方必须约定串口波特率、数据位宽、奇偶校验位、停止位等配置参数,从而按照相同的速率进行通信。异步通信以一个字符为传输单位,通信中两个字符间的时间间隔多少是不固定的,然而在同一个字符中的两个相邻位

波特率定义了CAN总线上传输数据的速度,通常以千位每秒(kbps)表示,如125kbps、250kbps或500kbps。波特率由CAN控制器的位定时参数决定,包括:波特率预分频器(BRP):将系统时钟分频以生成时间量子(Tq)。时间段1(TSEG1):包括传播段和相位段1,决定采样点前的时长。时间
开发STM32时,许多工程师常被一些表面现象误导,陷入调试困境。以下五大常见误区,几乎每个新手都会遇到,纠正它们可大幅提升开发效率。误区一:时钟配置 = 波特率准确错误认知:认为配置了波特率数值,通信就一定正常。真相:STM32的USART

不同单片机出厂时都自带“默认通信技能”,就像手机自带蓝牙一样。这些方式决定了它们怎么和其他设备“聊天”,选对方式才能避免“鸡同鸭讲”!1、51单片机:UART异步串口自带全双工UART,用RXD/TXD两根线通信默认波特率9600bps,适
串口通信看似简单,但帧同步问题常让工程师抓狂。从数据错位到丢包误判,这些“坑”不解决,通信就稳不了。一、包头错位问题:接收方找不到约定的包头(如0xAA 0x55),导致后续数据全错位。场景:干扰信号或波特率偏差导致首字节丢失,后续数据全乱





















