 扫码关注
扫码关注
























- 全部
- 默认排序
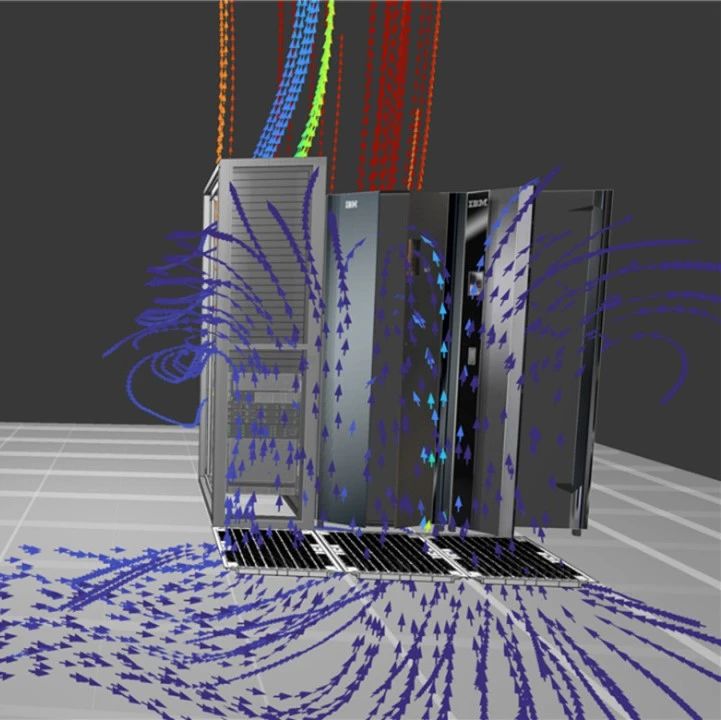
1、设计融合大势所趋如今,设计团队都在想方设法优化整体系统性能,因此电子和机械设计正逐渐融合。数据中心恰恰体现了这种融合——吞吐量计算、功耗和散热管理都是其主要的设计考虑因素。数据中心的能耗占到全球总能耗的百分之一。随着越来越多的应用依赖于由高性能互联处理器阵列组成的超大规模计算,预计未来几年的能耗
作为嵌入式系统中的核心组件,ARM处理器的存在可以确保系统的稳定性和性能,为了更好确保嵌入式的正常运行,ARM处理器还提供了7种工作模式,每种模式都有其特定的应用场景和权限级别。1、用户模式(USR)正常程序执行模式。不能直接切换到其他模式
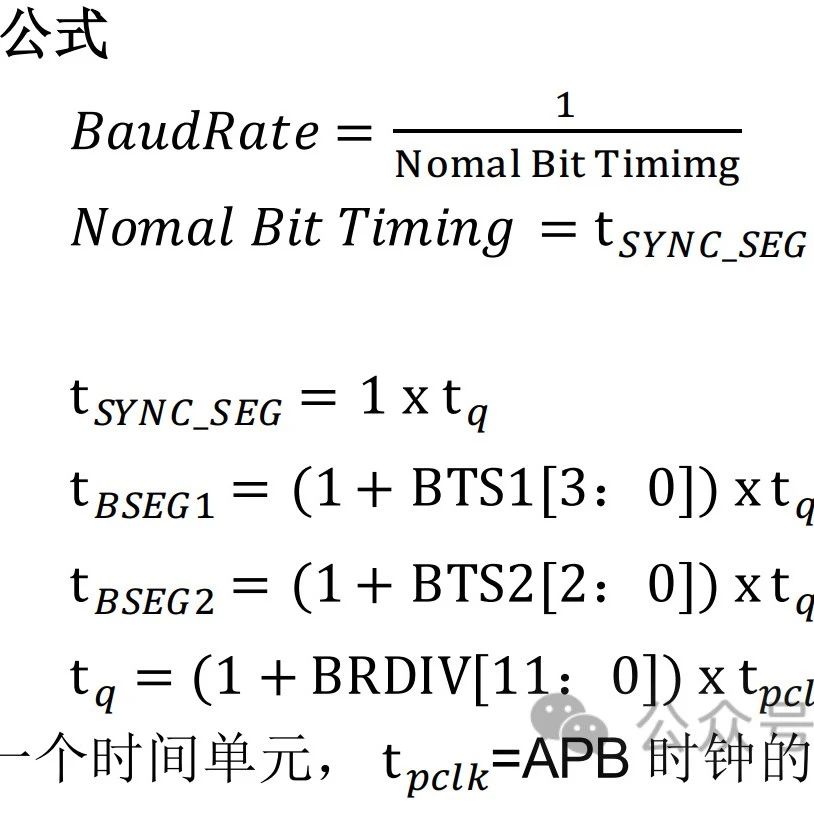
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因
如何计算CAN通信波特率
在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。1、理论波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。时钟频率(Fclk)CAN控制器的时钟频率。这是CAN模块的输入时钟,通常来自于微控制器的主时钟。分频因




















