扫码关注
扫码关注
























- 全部
- 默认排序
协作机器人是为与人直接交互而设计的机器人,即一种被设计成能与人类在共同工作空间中进行近距离互动的机器人,近几年协作机器人开始获得广泛关注。传统工业机器人是在安全围栏或其他保护措施之下,完成诸如焊接、喷涂、搬运码垛、抛光打磨等高精度、高速度的
极限作业机器人指可以在人为难以接受的环境下工作的工业机器人。由于极限机器人 的工作环境不适合人为示教操作,因此极限作业机器人属于第二代机器人。常见的极限作业机器人有多种,包括如原子能辐射下作业的机器人、水下作业的机器人、救灾排险机器人、空间

PCB抄板的技术实现过程简单来说,就是先将要抄板的电路板进行扫描,记录详细的元器件位置,然后将元器件拆下来做成物料清单(BOM)并安排物料采购,空板则扫描成图片经抄板软件处理还原成pcb板图文件,然后再将PCB文件送制版厂制板,板子制成后将

添加元件到原理图页
绘制原理图首先要从库中调用元器件到原理图中,然后进行网络连接设计。1)进入到原理图页,点击添加元件快捷按钮,如图4-8所示。图4-8 添加元件快捷键如若快捷图标被隐藏,可在工具栏空白处右击进行点击调用,如图4-9所示。图4-9 调出隐藏的工

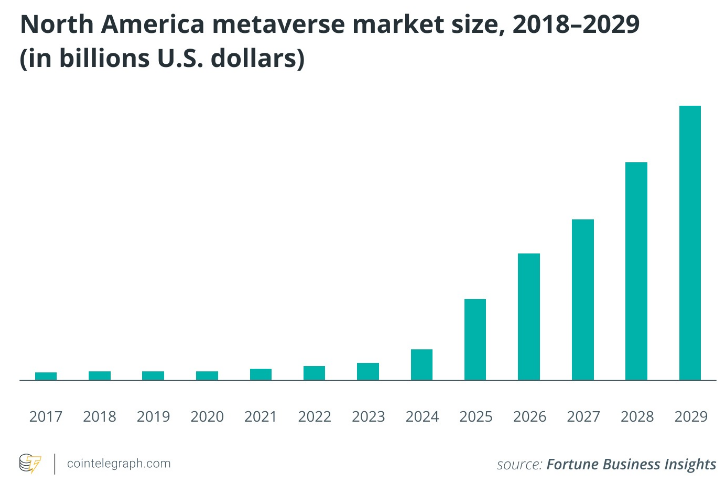
如今,元宇宙空间在炒作和新项目推出的数量方面正在迅速发展——以至于行业市场规模预计将从2022 年的 1002.7 亿美元增长到 2029 年的 15275.5 亿美元。但是这些新项目中有多少是甚至能够远程实现所设定的实际愿景? 我们距离看
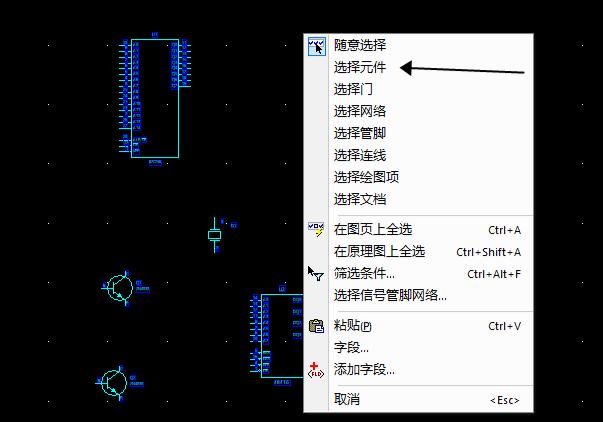
元件移动
在原理图页空白位置右击,然后对需要操作的对象进行筛选,默认是原理图页内所有元素都可以选中,容易误选,操作元件时筛选“选择元件”,如图4-15示。2)选中原理图页中的元件,然后进行拖动或者选中后右击选择“移动”功能,可对元件进行位置调整,如图
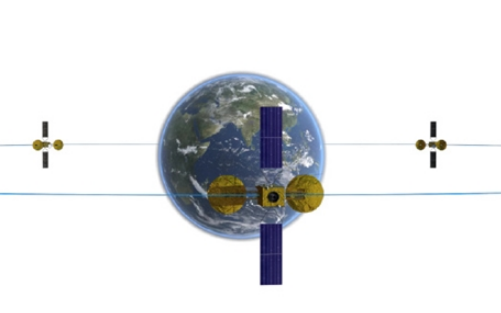
据中国航天科技集团消息,7月13日0时30分,长征三号乙运载火箭在西昌卫星发射中心升空,成功将天链二号03星送入预定轨道,发射任务取得圆满成功。我国第二代地球同步轨道数据中继卫星系统正式建成,至此中继卫星数量增加至8颗。该星最关键载荷的就是
机器人是一种由主体结构、控制器、指挥系统和监测传感器组成的,能够模拟人的某些行为、能够自行控制、能够重复编程、能在二维空间内完成一定工作的机电一体化的生产设备。工业机器人中使用了各种各样的传感器。工业机器人传感器能够理解和测量周围环境中物体
我国虽然在5G上、物联网上、航天航空上等多种领域处于国际先进水平,但不可否认的是我们也在多种领域落后于海外国家,如先进芯片、EDA软件、芯片制造等,其中就有科学计算软件,我国的科学计算软件基本上是靠海外进口,没有完全自主的国产软件。科学计算

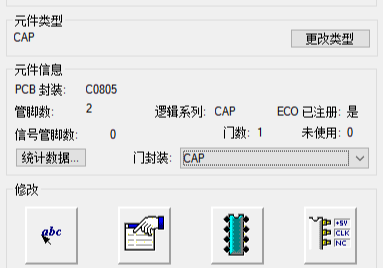
元件位号处理
在原理图空白处单击鼠标右键选择“选择元件”,选择需要更名的元件后单击右键点击“特性”,进入元件特性界面,点击“重命名元件”,如图4-23所示。图4-23 元件特性界面2)点击“重命名元件”按钮进入重命名元件界面,在文本框中输入元件位号名称后