 扫码关注
扫码关注
























- 全部
- 默认排序
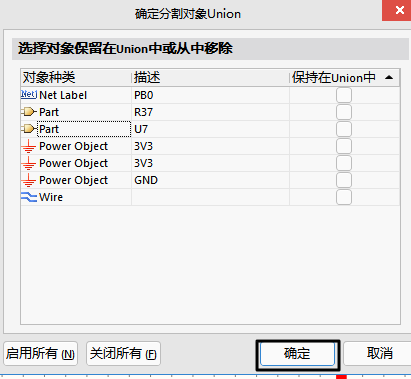
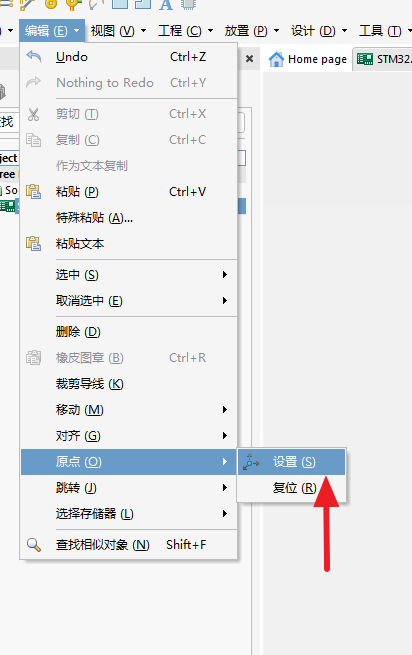
绘制原理图时一般是根据模块来进行绘制,在原理图中创建联合可以方便原理图中某个模块的移动和旋转,不用进行框选后再整体移动,在一定程度上可以提高设计的效率,那么如何在原理图中创建及打散联合呢?
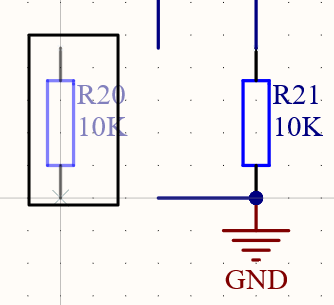
在进行原理图绘制时,经常会需要拖拽元器件,原理图中走线是默认和器件一起移动的,这样在元器件摆放错误,需要进行移动时会很不方便,那么如何使连线不和器件一器移动呢?
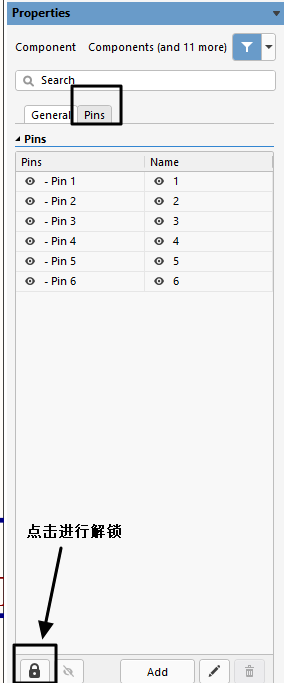
在绘制原理图时,有时会遇到元器件管脚放置错误需要更改管脚位置,或者管脚名错误需要更改管脚信息的情况,一般情况可以直接去与原理图库进行更改,这里介绍一下如何在原理图中移动元器件管脚以及更改管脚名称?
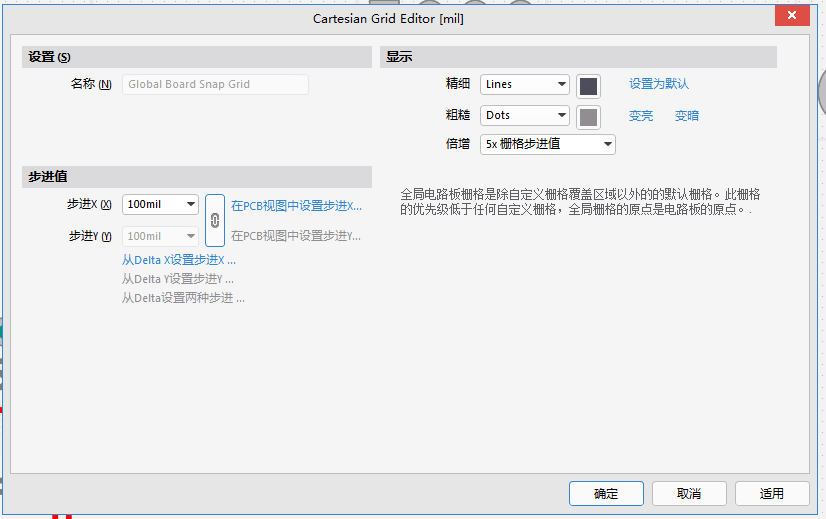
在PCB的布局与布线的过程中,格点的设置是至关重要的。格点设置太大会导致许多元器件或者走线对齐不了等情况,格点设置太小也会造成移动区域比较小
设计时需要选择拖动一个元器件或者一个模块去进行想要的布局,那么,就会遇到在拖动的时候,这个元器件或者这个模块是高亮,但是其它元器件和其他区域全部都是完全黑暗的,导致根本都看不清楚其他的区域,以致于此刻拖动的元器件或者模块被放置的位置在哪里,是不是重叠了其它的元器件放置。

东芝推出新款采用PWM控制的双H桥直流有刷电机驱动IC,推荐应用为移动设备和家用电器-东芝的新一代DMOS工艺让TC78H660FNG能够在最大额定值为18V/2.0A[1]时实现低至0.48Ω的导通电阻,较东芝的现有产品发热更低。

爱驰研发CARL智能移动充电机器人,旨在应对市场电动汽车充电难题-现阶段,电动汽车充电一直是一个有待完善的问题,因为固定的充电桩已经无法满足迅速增长的充电需求。
一场事关很多人生死的战疫敲响警钟,新冠疫情的到来不但为普罗大众普及了公共卫生知识与机器人应用的重要性,也将现下机器人系统无人化操作的局限性揭露。 机器人技术的无人化发展 无人化是机器人发展的必然趋势,而移动机器人技术的发展史就是无人化的演进史。 从导航方式的发展看,AGV导航技术从最初的有轨导航到无轨导航,再到自主规划路径,对特定标志物的依赖逐渐较少,对环境适应性逐渐增强,对人为干预度逐渐降低。 从调度方式的
如何认识Windows 7三种电源计划-如果用户所使用的是笔记本电脑,则可以将鼠标移动指针至通知区域中的“电池”图标上单击,会出现电池状态以及选择电源计划的指示器。




















