扫码关注
扫码关注
























- 全部
- 默认排序
工业自动控制系统通过工业控制计算机对传感器及局域网所采集的各种信息的归纳、分析、整理,实现信息管理与自动控制的一体化,并通过权限认证确保了信息的安全。工业自动化控制主要分为工业自动化系统、硬件和软件三个部分。现今应用较多的工业自动化控制设备

霍尔效应,是指有小电流通过的一个半导体薄片置于磁场中,受到磁场作用影响电流发生偏转,在控制电流的垂直方向上的半导体两侧形成了电压差,该电势差就是霍尔电压。霍尔电压的大小,与磁场强度和半导体内通过的控制电流成正比。根据原理不同,霍尔效应电流传

差分线这里需要调整走线尽量不要有直角锐角这里是输出走线应该加粗处理最好铺铜处理。SD卡所有信号线要做等长处理,以时钟线为目标,目标控制在300mil以内。这个差分在这里另一根就断了,不耦合对内也不等长。很多的线间距都不满足3w原则自己调整一
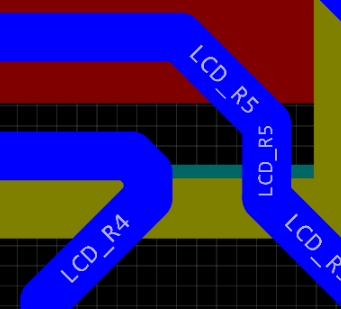
电源输入电容应该靠近管脚放置输出电容电阻应该靠近管脚放置到电感后面输出3.3v晶振布局错误,晶振的一对线要走成类差分的形式, 线尽量短如下图。typec的LCD_R4、LCD_R5要走差分阻抗控制90欧姆做对内等长,差分走线尽量减少打孔换层
晶振布局、布线错误,晶振的一对线要走成类差分的形式, 线尽量短如下图。typec的LCD_R4、LCD_R5要建立差分对走差分阻抗控制90欧姆做对内等长,换层需要靠近过孔打回流地过孔,D7、D8应该尽量靠近typec管脚放置。TF卡所有信号
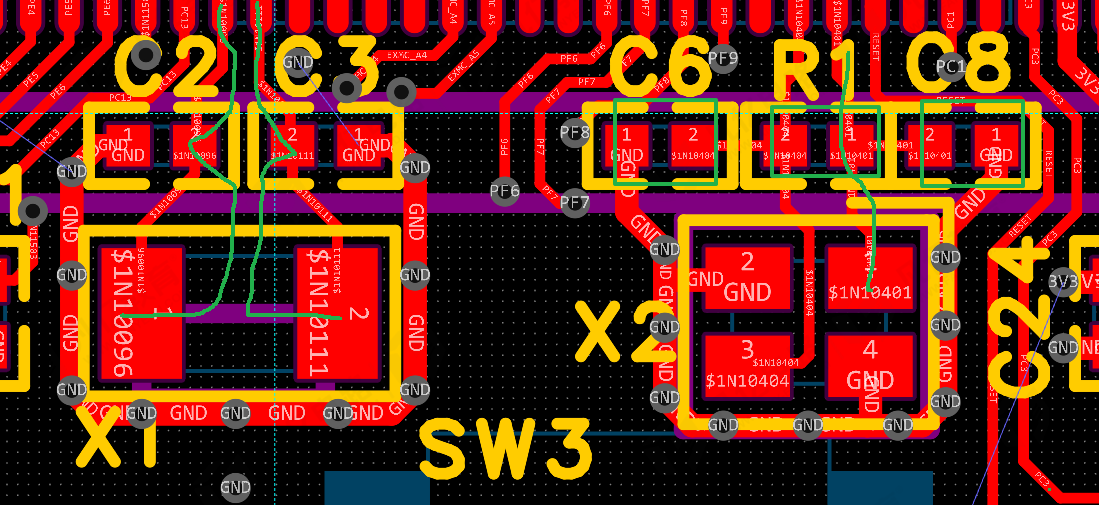
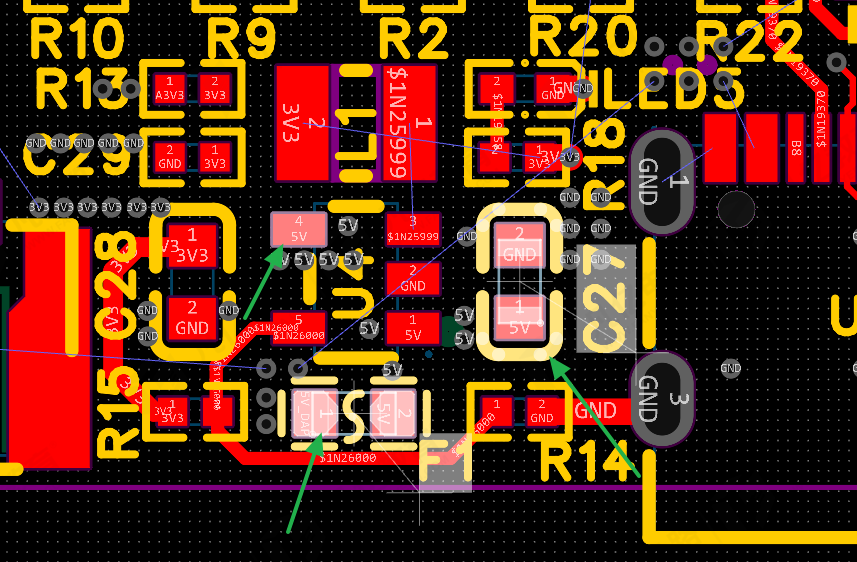
电源模块反馈电路错误,r15接入反馈电源到r14在到5号管脚。2.晶振布局布线错误3.typec差分对内误差控制5mil以内,尽量避免出现不耦合4.TF卡所有信号线要整组 ,做等长处理以时钟线为目标,目标控制在300mil以内。

电容器在电力系统中也是比较常见的,为了保证其安全稳定运行,电容器保护装置对电容器及补偿电路中出现的过流、短路、涌流、谐波等故障进行保护,在功率因数自动补偿控制电路中广泛应用。为帮助大家深入了解,本文将对电容器保护装置的相关知识予以汇总。如果
以下文章来源于AR辅助PCB调试与纠错 ,作者inspectAR本文要点了解 4 针 PWM 接头的基本知识了解 4 针 PWM 风扇的工作原理了解设计 4 针 PWM 风扇控制器需要什么什么是 4 针 PWM 接头?4 针 PWM 接头连

电容器在电力系统中也是比较常见的,为了保证其安全稳定运行,电容器保护装置对电容器及补偿电路中出现的过流、短路、涌流、谐波等故障进行保护,在功率因数自动补偿控制电路中广泛应用。为帮助大家深入了解,本文将对电容器保护装置的相关知识予以汇总。如果
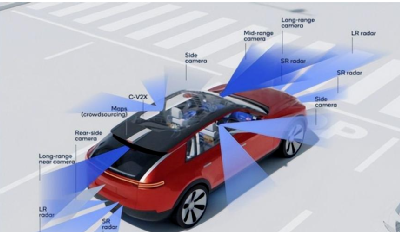
/ 导读 /对于目前火热的自动驾驶而言,普通人可能会产生疑问,自动驾驶系统如何感知周围环境并做出相应的合理的决定并执行?其实,自动驾驶技术的主要模块共三大类,即感知、规划和控制。它们之间相互协作,共同为车辆的安全性与舒适性保驾护航。简单来说