扫码关注
扫码关注
























步进电机以“脉冲驱动、精准位移”的特性,成为3D打印、机器人关节、数控机床等场景的核心执行元件。其性能直接由术语与指标定义,掌握这些“密码”是优化系统效率、避免失步的关键。本文以技术参数为锚点,拆解步进电机的核心术语与选型逻辑。

一、核心术语:定义电机行为的“语言”
步距角
定义:每输入一个电脉冲,转子转动的理论角度。
公式:步距角=360°/(转子齿数×拍数)。
典型值:混合式步进电机多为1.8°(整步),细分驱动后可达0.007°/微步。
拍数
定义:完成一个磁场周期变化所需的脉冲数。
分类:单拍(单相通电)、双拍(两相交替通电)、半步(单双拍混合)。
影响:拍数越多,步距角越小,但驱动复杂度上升。
相数
定义:电机内部独立绕组的组数。
典型值:两相(成本低,扭矩大)、三相(运行平稳,尺寸大)。
逻辑:相数增加可提升精度,但驱动电路成本同步提高。
保持转矩
定义:绕组通电但转子静止时,电机能输出的最大静态转矩。
意义:决定电机在锁定状态下的负载能力,是选型的核心参数。
定位转矩
定义:电机断电后,由磁阻效应产生的残留转矩。
特性:通常小于保持转矩,影响断电时的位置稳定性。
失步
定义:电机转速跟不上脉冲频率,导致转子与定子磁场不同步。
诱因:脉冲频率过高、负载转矩过大、驱动电压不稳。
低频振荡
定义:电机在低频运行时,因共振产生的振动与噪声。
频率范围:通常为10Hz-200Hz,需通过细分驱动或机械阻尼抑制。
二、关键指标:量化电机性能的“标尺”
静态指标
步距角精度:实际步距角与理论值的误差,四拍运行时≤5%,八拍运行时≤15%。
静转矩:未通电时,转子因磁阻效应保持位置的力矩,影响断电后的位置稳定性。
最大静转矩:电机在静止状态下能承受的最大负载转矩,决定启动能力。
动态指标
启动频率:电机能不失步启动的最高脉冲频率,与负载转动惯量相关。
运行频率:电机连续运转时的最高脉冲频率,影响高速性能。
矩频特性:输出转矩随转速升高的衰减曲线,混合式步进电机在高速时衰减更平缓。
电气指标
额定电流:电机正常工作时的相电流,影响发热与效率。
相电阻:绕组电阻,决定电流与功耗。
相电感:绕组电感,影响电流上升时间与高频响应。
三、选型逻辑:从场景到参数的“匹配术”
精度需求
选型逻辑:步距角越小,精度越高。
场景匹配:家用雕刻机、打印机选1.8°;精密加工、医疗设备选0.9°或细分驱动。
负载能力
选型逻辑:计算负载阻力矩,预留20%-30%余量。
场景匹配:负载阻力矩0.5N·m,选0.6-0.7N·m扭矩电机。
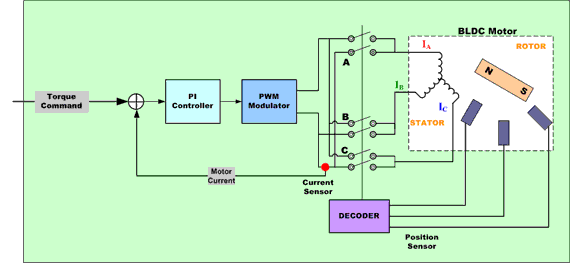
驱动方式
开环驱动:结构简单、成本低,适合精度要求不高的场景(如普通打印机)。
闭环驱动:加编码器反馈,避免失步,适合高精度场景(如3D打印机、医疗设备)。
速度需求
选型逻辑:高速场景选三相电机(运行更平稳),低速场景选两相电机(扭矩更大)。
场景匹配:分拣设备需快速启停,选高启动频率电机;传送带需匀速运行,选恒扭矩电机。
本文凡亿教育原创文章,转载请注明来源!