扫码关注
扫码关注
























引言
MEMS陀螺仪在自主导航和物联网设备中发挥着不可或缺的作用。随着应用领域的扩展,环境温度波动和应力效应对MEMS陀螺仪长期稳定性产生显著影响。因此,提高比例因子(SF)的温度稳定性已经成为研究的重点。
温度对MEMS陀螺仪的影响可以通过两个基本机制来理解。首先是硅的热机械特性随温度变化,特别是杨氏模量随温度变化率为-60ppm/°C。其次是更为复杂的热应力影响,这种影响来自MEMS结构、芯片粘接、封装和PCB等各个部件之间的相互作用。第一种机制通常导致刚度降低,而第二种机制则会以更复杂和难以预测的方式影响陀螺仪各模式之间的刚度分布[1]。


图1:扫描电镜下的双环陀螺仪,工作频率为58kHz,环形结构周围分布有16对电极,用于实现各种控制功能。
1
器件结构与传感机理
研究的器件是一种双环AM陀螺仪,外环作为主要振动部件,直径为3.2mm。设计中在外环周围布置了16对电极,用于差分驱动、检测、频率调谐和力平衡控制。器件工作在约58kHz的n=2酒杯模式,频率分裂为110Hz。
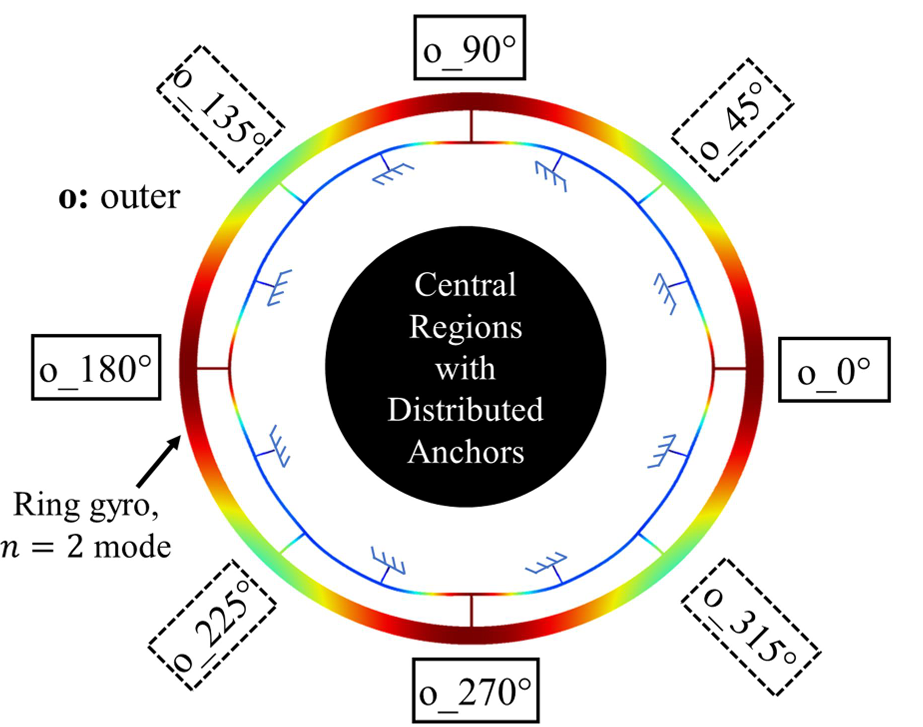
图2:应力传感器以45°间隔均匀分布在环形结构周围,实现全面的应力测量。
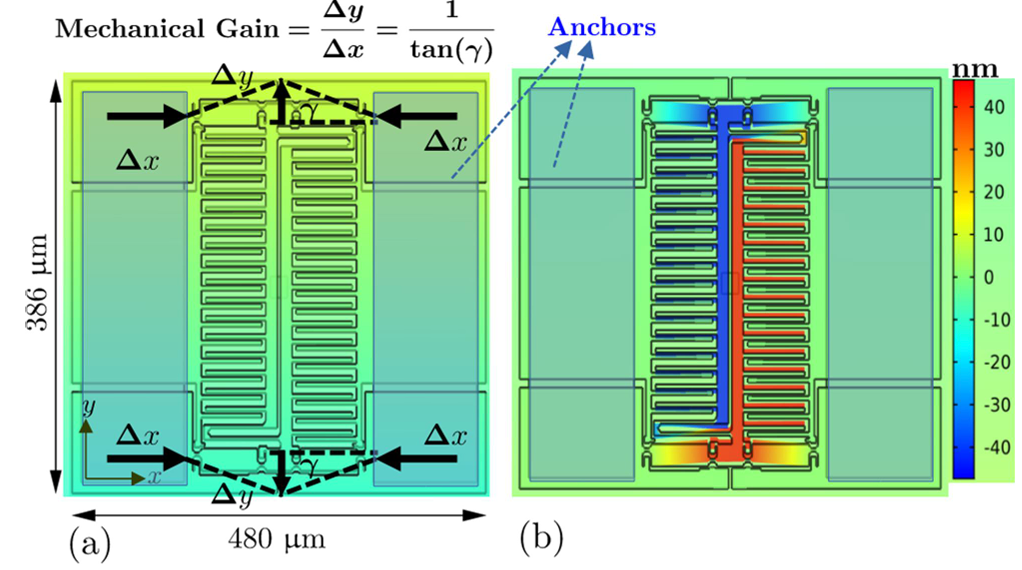
图3:应力传感器在不同条件下的位移分布:(a)纯热膨胀状态和(b)锚点受到机械载荷时的状态,展示了应力传感的工作原理。
2
测试设置与实验方法
实验设置经过精心设计,以确保在受控条件下评估器件性能。子板上安装的PCB加热器实现了独立于电路的温度循环控制,同时底部的PTAT传感器监测温度变化。
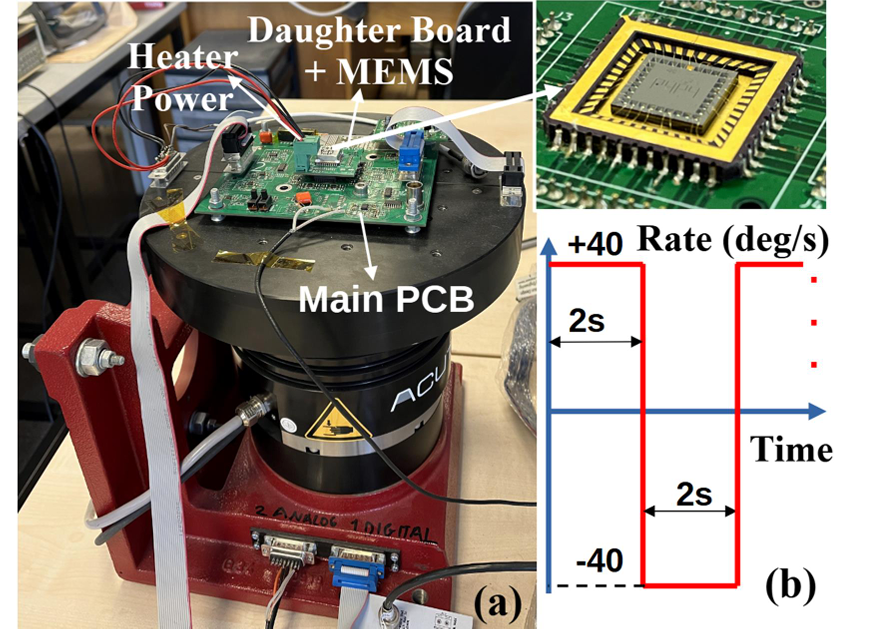
图4:完整的测试装置,展示了(a)转台和PCB加热器的配置,以及(b)温度测试过程中使用的抖动率输入模式。
测试过程中施加了持续2秒的±40°/s抖动率输入,同时对器件进行温度循环。分别进行了两种测试配置:Test#1采用力平衡闭环检测模式,Test#2采用传统开环检测模式。
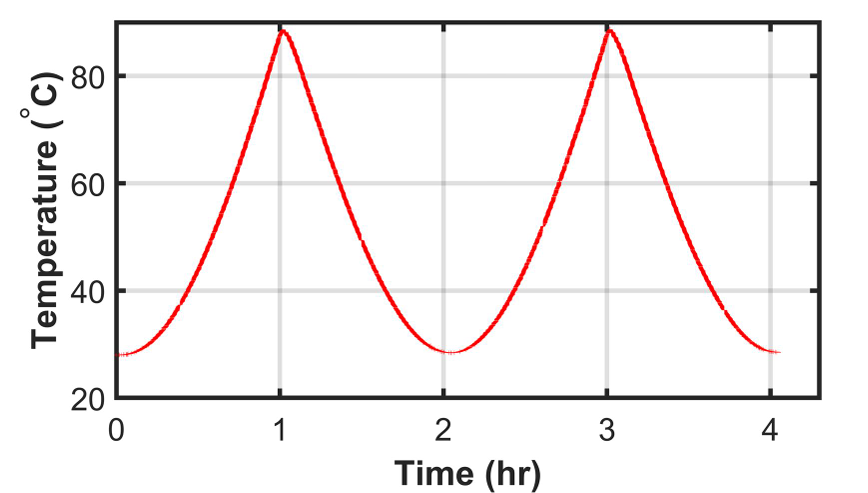
图5:测试中使用的温度循环曲线,显示了25-90°C范围内的受控温度变化。
3
结果分析与性能评估
实验结果揭示了器件在温度变化条件下的重要特性。应力传感器检测到最大应变为60微应变,器件各部分同时存在压应力和拉应力区域。
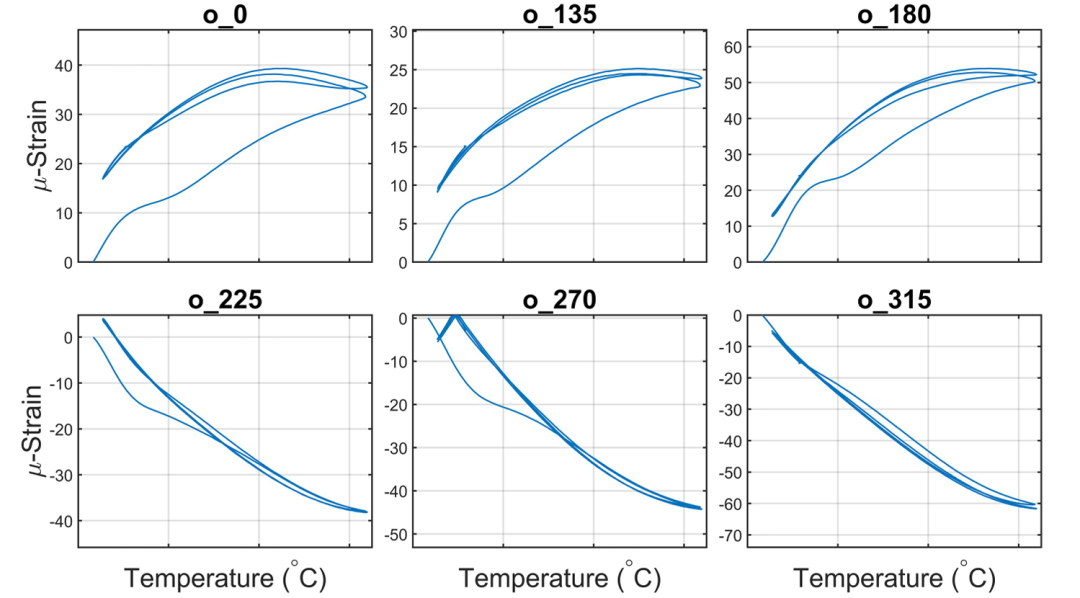
图6:Test#1期间测得的应变模式,显示了不同传感器位置的应力分布,揭示了复杂的热机械相互作用。

图7:驱动模式频率响应随温度变化的滞回效应,突显了热机械相互作用的复杂性。
基于应力的补偿方法相比传统的仅基于温度的校准方法,性能提升了15倍以上。
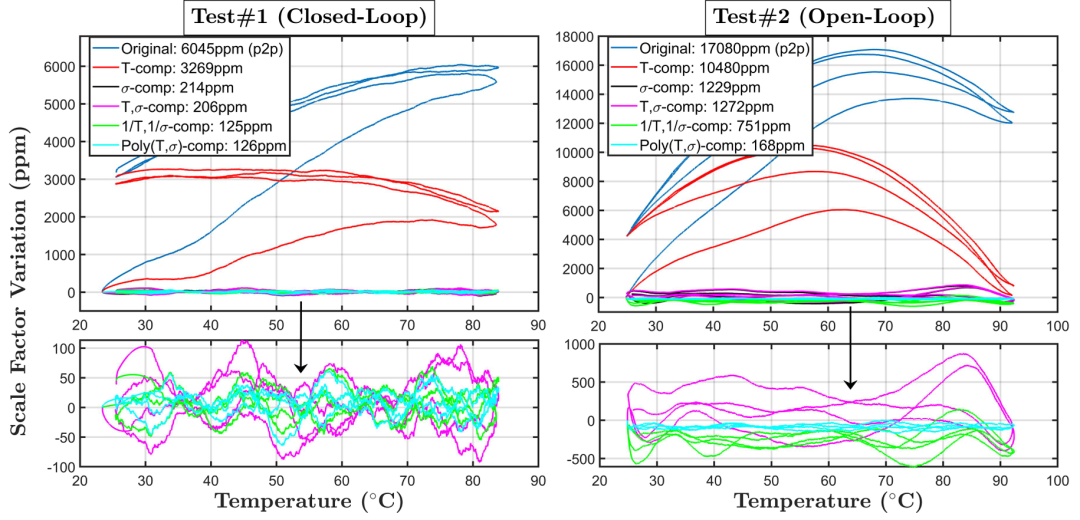
图8:不同校准方法的比例因子补偿结果对比,展示了基于应力补偿的优越性能。
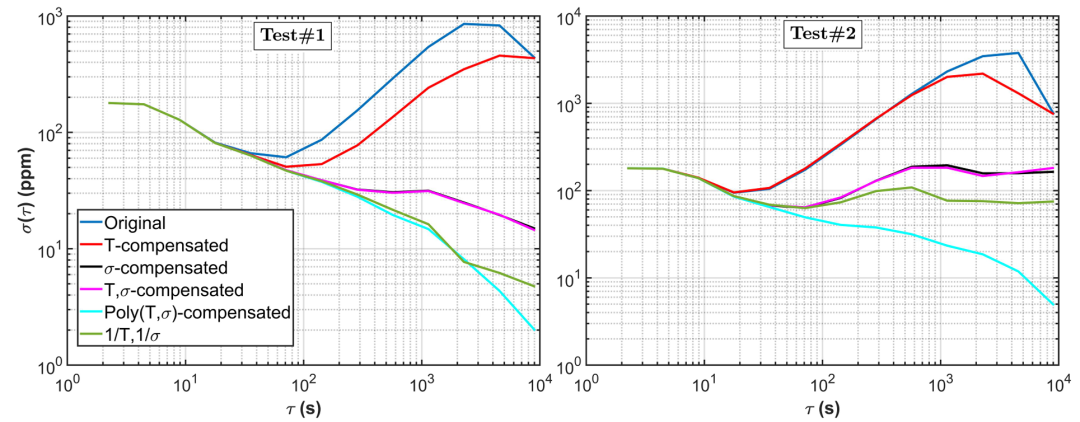
图9:残余比例因子的艾伦方差分析,显示了各种补偿技术带来的长期稳定性改善。
研究结果表明,结合应力和温度测量进行校准可以实现峰峰值SF误差低于200ppm,其中Test#1达到128ppm,Test#2达到168ppm。与现有商用解决方案相比,这是MEMS陀螺仪性能的显著提升。
4
结论
片上应力传感的集成为提高MEMS陀螺仪性能提供了有效方法。通过捕捉和补偿复杂的热机械相互作用,特别是滞回效应,实现了比例因子稳定性的显著提升。这项技术进步为高性能MEMS陀螺仪在要求苛刻的应用场景中的应用奠定了基础。